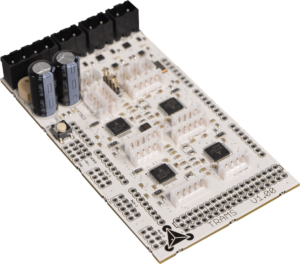
Präzise Bewegungssteuerung für anspruchsvolle Anwendungen: Der TMCM-1110 1-Achsen-Controller stepRocker
Der TMCM-1110 1-Achsen-Controller stepRocker wurde speziell für Ingenieure und Automatisierungsexperten entwickelt, die eine hochpräzise und zuverlässige Steuerung von Schrittmotoren in anspruchsvollen industriellen und wissenschaftlichen Umgebungen benötigen. Dieses Modul löst das Problem der Komplexität bei der Anbindung und Steuerung einzelner Schrittmotoren, indem es eine integrierte und einfach zu bedienende Lösung bietet, die eine feinfühlige Bewegungsausführung ermöglicht und gleichzeitig die Integration in bestehende Systeme vereinfacht.
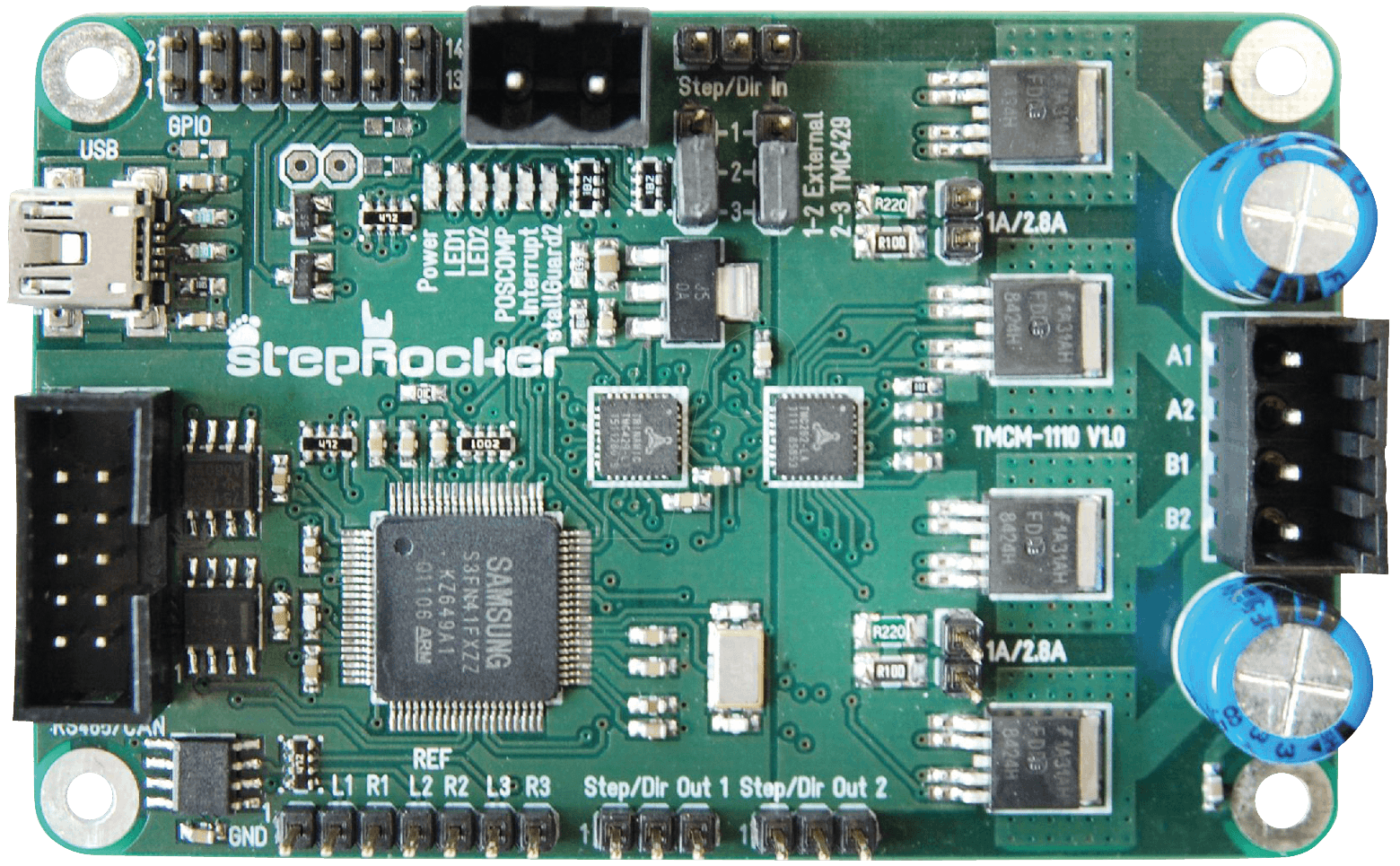
Überlegene Leistung und Integration des TMCM-1110
Im Vergleich zu herkömmlichen Schrittmotorsteuerungen, die oft separate Treiber, Decoder und Schnittstellenmodule erfordern, bietet der TMCM-1110 stepRocker einen signifikanten Vorteil durch seine integrierte Bauweise. Die nahtlose Kombination aus Motorcontroller und Treiber in einem einzigen Modul minimiert Verkabelungsaufwand, reduziert potenzielle Fehlerquellen und spart wertvollen Bauraum. Seine hochentwickelte Ansteuerelektronik ermöglicht eine präzisere und ruckelfreiere Bewegung von Schrittmotoren, selbst unter Lastschwankungen oder bei dynamischen Lastwechseln. Dies resultiert in einer höheren Prozessgenauigkeit, reduzierten mechanischen Belastungen und einer gesteigerten Lebensdauer der angetriebenen Komponenten.
Kernfunktionalitäten und technologische Vorteile
Der TMCM-1110 ist mehr als nur ein einfacher Treiber; er ist ein intelligenter Controller, der eine Vielzahl von fortschrittlichen Funktionen für die Schrittmotorsteuerung bietet. Dies umfasst:
- Feinere Schrittauflösung: Durch Mikroschritt-Technologie werden Bewegungen in deutlich feinere Inkremente unterteilt, was zu einer sanfteren und präziseren Positionierung führt. Dies ist entscheidend für Anwendungen, die eine exakte Justierung erfordern, wie z.B. in der Messtechnik oder der Positionierung von Optiken.
- Integrierte Ansteuerungselektronik: Der Schrittmotortreiber ist direkt auf dem Controller-Modul integriert, was den Platzbedarf reduziert und die elektrische Anbindung vereinfacht. Dies ermöglicht schlankere Systemdesigns.
- Umfassende Schnittstellen: Die modulare Bauweise des TMCM-1110 ermöglicht die einfache Integration über gängige Kommunikationsschnittstellen wie CAN oder RS485, was die Vernetzung und Steuerung mehrerer Achsen in komplexen Systemen erleichtert.
- Flexible Konfigurierbarkeit: Die Parameter des Controllers, wie z.B. Stromstärke, Schrittmodus und Beschleunigungsrampen, können flexibel an die spezifischen Anforderungen der Anwendung angepasst werden. Dies ermöglicht eine optimale Anpassung an verschiedene Motortypen und Lastbedingungen.
- Robustheit und Zuverlässigkeit: Entwickelt für industrielle Umgebungen, bietet der TMCM-1110 eine hohe Zuverlässigkeit und Langlebigkeit auch unter anspruchsvollen Betriebsbedingungen. Dies schützt Ihre Investition und minimiert Ausfallzeiten.
Technische Spezifikationen und Materialgüte
Der TMCM-1110 stepRocker zeichnet sich durch seine hochwertige Verarbeitung und die Auswahl geeigneter Materialien aus, die für eine lange Lebensdauer und zuverlässige Funktion sorgen. Die Elektronikkomponenten sind sorgfältig ausgewählt, um eine hohe Leistungsdichte und Energieeffizienz zu gewährleisten. Die thermische Anbindung und die Gehäusekonstruktion sind auf eine effektive Wärmeabfuhr optimiert, was Überhitzung vorbeugt und die Betriebssicherheit erhöht.
| Eigenschaft | Beschreibung |
|---|---|
| Controller-Typ | 1-Achsen-Schrittmotorcontroller mit integriertem Treiber |
| Kommunikationsschnittstellen | CAN, RS485 (abhängig von der genauen Konfiguration/Erweiterungsmodul) |
| Motortreiber-Technologie | Fortschrittliche Mikroschritt-Algorithmen für sanfte und präzise Bewegungen |
| Spannungsbereich (Motortreiber) | Breiter Bereich zur Unterstützung verschiedener Motortypen und Leistungsanforderungen |
| Stromregelung | Hochpräzise Stromregelung zur Schonung des Motors und Optimierung der Drehmomentabgabe |
| Bauform | Kompaktes Moduldesign für einfache Integration in Steuerungsgehäuse und Maschinen |
| Kühlkonzept | Passivkühlung durch optimierte Bauteilplatzierung und Leiterbahnen; optional aktive Kühlung bei höheren Lasten |
| Anwendungsbereiche | Automatisierungstechnik, Robotik, Messtechnik, Labortechnik, Präzisionspositionierung |
Anwendungsgebiete und Systemintegration
Der TMCM-1110 1-Achsen-Controller stepRocker ist die ideale Lösung für eine breite Palette von Anwendungsfeldern, in denen präzise und gesteuerte Bewegungen von entscheidender Bedeutung sind. Dazu gehören:
- Industrielle Automatisierung: In Fertigungslinien für Pick-and-Place-Aufgaben, Materialhandhabungssysteme, Etikettier- und Verpackungsmaschinen. Die hohe Zuverlässigkeit und die präzise Steuerung minimieren Fehler und maximieren den Durchsatz.
- Robotik: Als Gelenksteuerung in kleineren Robotern oder als präzise Achse in spezialisierten Roboterarmen für Montage-, Inspektions- oder Handhabungsaufgaben. Die feine Schrittauflösung ermöglicht feinmotorische Bewegungen.
- Messtechnik und Prüftechnik: Zur Positionierung von Sensoren, Probenhaltern oder optischen Komponenten in Prüfgeräten und Messsystemen, wo höchste Genauigkeit und Wiederholbarkeit gefordert sind.
- Labortechnik: In automatisierten Laborgeräten wie Pipettierrobotern, Probenwechslern oder Mikroskop-Positioniertischen, wo exakte und reproduzierbare Bewegungen unerlässlich sind.
- CNC-Maschinen und 3D-Drucker: Als kostengünstige und leistungsfähige Steuereinheit für einzelne Achsen in kleineren CNC-Maschinen oder als Kernkomponente für fortschrittliche 3D-Drucker-Designs.
- Medizintechnik: In Geräten für Diagnostik, Therapie oder chirurgische Assistenzsysteme, bei denen Präzision und Sicherheit oberste Priorität haben.
Die Integration des TMCM-1110 in bestehende Steuerungssysteme wird durch die standardisierten Schnittstellen und die gut dokumentierte Software-Schnittstelle (API) erheblich vereinfacht. Die Anwender können auf eine umfangreiche Bibliothek von Befehlen und Funktionen zugreifen, um die gewünschte Bewegungssequenz zu realisieren.
Flexibilität und Skalierbarkeit im Systemdesign
Ein wesentlicher Vorteil des TMCM-1110 liegt in seiner Flexibilität und Skalierbarkeit. Durch die Verwendung des CAN-Bussystems können mehrere Controller nahtlos miteinander vernetzt werden, um komplexe mehrachsige Bewegungsabläufe zu realisieren. Dies ermöglicht es Ingenieuren, Systeme schrittweise zu erweitern und an wachsende Anforderungen anzupassen, ohne die vorhandene Infrastruktur komplett überdenken zu müssen. Die Möglichkeit, jeden Controller individuell zu konfigurieren, stellt sicher, dass jede Achse optimal auf ihre spezifische Aufgabe abgestimmt ist, was zu einer maximalen Effizienz des Gesamtsystems führt.
Häufig gestellte Fragen zu TMCM-1110 – 1-Achse Controller TMCM-1110 stepRocker
Was ist der Hauptvorteil des TMCM-1110 gegenüber herkömmlichen Schrittmotorsteuern?
Der Hauptvorteil des TMCM-1110 liegt in seiner integrierten Bauweise, die einen Controller und Treiber in einem Modul kombiniert. Dies reduziert den Verkabelungsaufwand, minimiert Fehlerquellen und spart wertvollen Bauraum. Darüber hinaus bietet er durch fortschrittliche Mikroschritt-Technologie eine deutlich feinere und sanftere Bewegung.
Welche Kommunikationsschnittstellen unterstützt der TMCM-1110?
Der TMCM-1110 unterstützt in der Regel gängige industrielle Kommunikationsschnittstellen wie CAN und RS485. Die genaue Verfügbarkeit kann je nach spezifischer Produktvariante variieren.
Ist der TMCM-1110 für den Einsatz in rauen Industrieumgebungen geeignet?
Ja, der TMCM-1110 ist speziell für den Einsatz in industriellen Umgebungen konzipiert und zeichnet sich durch hohe Zuverlässigkeit und Robustheit aus. Die Elektronik und die Bauweise sind auf Langlebigkeit und Betriebssicherheit auch unter anspruchsvollen Bedingungen ausgelegt.
Wie wird die Bewegung des Schrittmotors mit dem TMCM-1110 gesteuert?
Die Steuerung erfolgt über digitale Befehle, die über die Kommunikationsschnittstellen an den Controller gesendet werden. Der TMCM-1110 verarbeitet diese Befehle und generiert die notwendigen Ansteuerungssignale für den Schrittmotor, wobei er fortschrittliche Algorithmen zur Mikroschritt-Technologie nutzt, um präzise und ruckelfreie Bewegungen zu ermöglichen.
Welche Arten von Schrittmotoren können mit dem TMCM-1110 betrieben werden?
Der TMCM-1110 ist darauf ausgelegt, eine breite Palette von Schrittmotoren zu betreiben. Dank der flexiblen Konfigurierbarkeit der Stromstärke und des Spannungsbereichs kann er an verschiedene Motortypen und Leistungsanforderungen angepasst werden.
Benötige ich zusätzliche Software, um den TMCM-1110 zu programmieren?
Ja, zur Programmierung und Konfiguration des TMCM-1110 wird in der Regel eine entsprechende Software-Schnittstelle (API) oder ein Entwicklungstool benötigt, das vom Hersteller bereitgestellt wird. Dies ermöglicht die Einstellung von Parametern und die Erstellung von Bewegungssequenzen.
Wie wird die Wärmeabfuhr bei hoher Auslastung des TMCM-1110 gewährleistet?
Der TMCM-1110 verfügt über ein optimiertes passives Kühlkonzept. Bei sehr hohen Lasten oder in Umgebungen mit erhöhter Umgebungstemperatur kann eine zusätzliche aktive Kühlung (z.B. durch einen Lüfter) notwendig sein, um die Betriebstemperatur im optimalen Bereich zu halten und die Langlebigkeit zu gewährleisten.