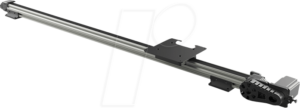
Präzision und Vielseitigkeit für Ihre Projekte: Der RM-X52-TNL – OpenManipulator mit 50g Nutzlast
Der RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast wurde entwickelt, um präzise und wiederholgenaue Handhabungsaufgaben in Forschung, Entwicklung und industrieller Prototypenfertigung zu meistern. Wenn Sie nach einer kompakten und leistungsfähigen Roboterarm-Lösung suchen, die eine Zuladung von bis zu 50 Gramm mühelos bewältigt und sich flexibel an Ihre spezifischen Anforderungen anpassen lässt, ist dieser OpenManipulator die ideale Wahl.
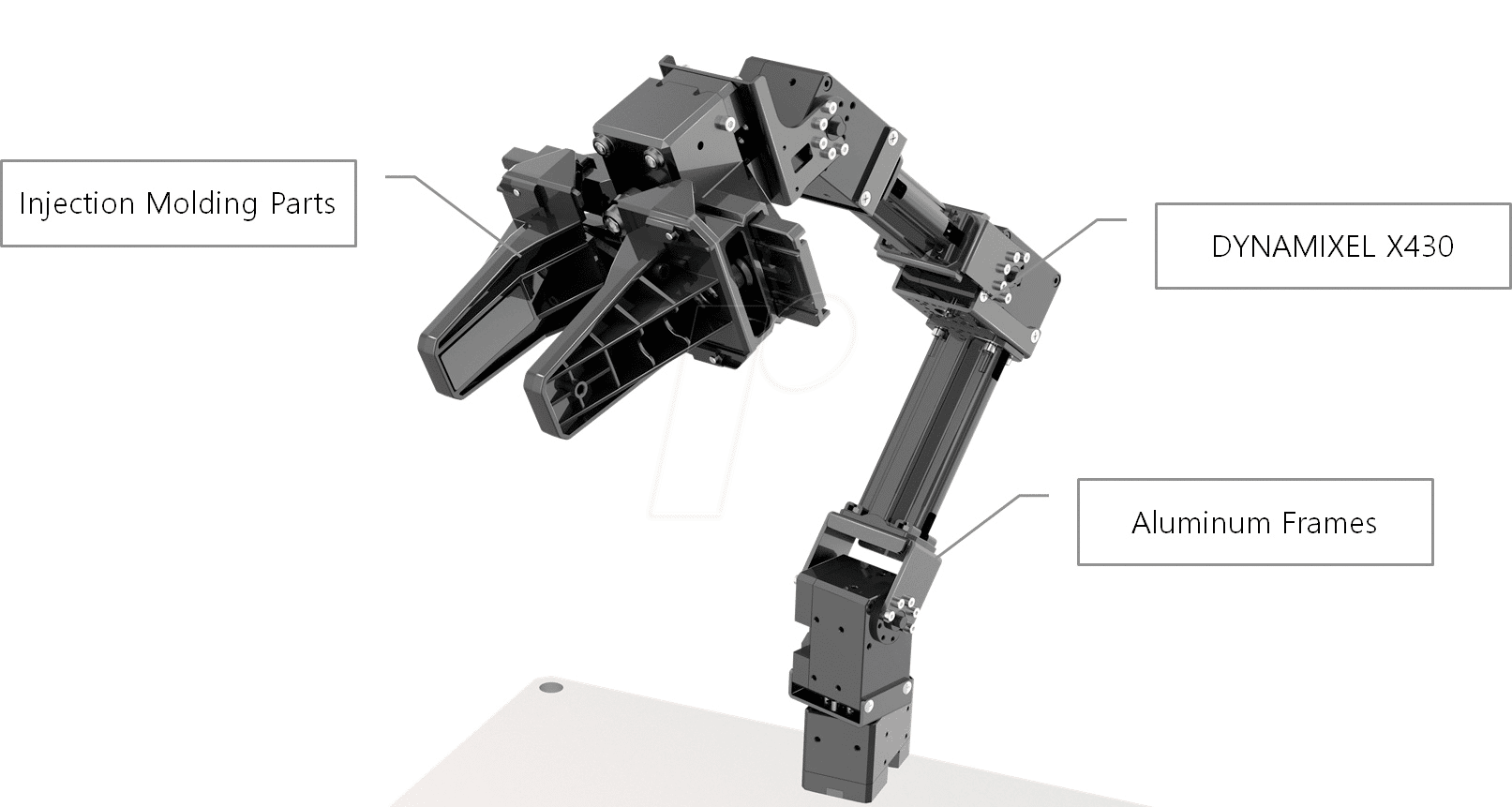
Innovatives Design für maximale Effizienz
Der RM-X52-TNL zeichnet sich durch sein durchdachtes Design aus, das maximale Bewegungsfreiheit bei minimalem Platzbedarf ermöglicht. Die Konstruktion basiert auf bewährten kinematischen Prinzipien, die eine hohe Steifigkeit und Präzision gewährleisten. Im Gegensatz zu integrierten oder weniger modularen Systemen bietet der OpenManipulator eine offene Architektur, die Entwicklern und Ingenieuren die Freiheit gibt, ihn an spezifische Steuerungssoftware, Sensoren und Endeffektoren anzupassen.
Herausragende Leistung und technische Spezifikationen
Die Kernkompetenz des RM-X52-TNL liegt in seiner Fähigkeit, komplexe Bewegungsabläufe mit einer Nutzlast von bis zu 50 Gramm zuverlässig auszuführen. Dies macht ihn zu einem unverzichtbaren Werkzeug für Aufgaben wie:
- Feinmontage von Kleinteilen
- Automatisierte Bestückung von Leiterplatten
- Präzises Pipettieren in Laborumgebungen
- Handhabung von empfindlichen Komponenten in der Forschung
- Interaktive Demonstrationssysteme in Bildungseinrichtungen
- Kleine Pick-and-Place-Applikationen
Vorteile des RM-X52-TNL – OpenManipulator
Die Entscheidung für den RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast bietet Ihnen entscheidende Wettbewerbsvorteile:
- Hohe Präzision: Ermöglicht exakte Positionierung und Wiederholgenauigkeit, unerlässlich für anspruchsvolle Montage- und Handhabungsprozesse.
- Flexibilität und Anpassungsfähigkeit: Die Open-Source-Architektur erlaubt eine tiefe Integration in bestehende Systeme und die Anpassung an individuelle Software- und Hardware-Anforderungen.
- Kompakte Bauform: Nimmt wenig Platz ein und eignet sich somit ideal für den Einsatz auf Labortischen oder in beengten Produktionsumgebungen.
- Leichtgewichtige Konstruktion: Trägt zur Energieeffizienz bei und minimiert die Belastung der Gelenke, was eine längere Lebensdauer fördert.
- Robuste Materialauswahl: Gefertigt aus hochwertigen Materialien für Langlebigkeit und Zuverlässigkeit im Dauereinsatz.
- Erweiterbarkeit: Einfache Integration von zusätzlichen Sensoren, Kameras oder spezialisierten Greifern, um den Funktionsumfang zu erweitern.
- Kosteneffizienz: Bietet ein exzellentes Preis-Leistungs-Verhältnis für präzise Roboteranwendungen im Vergleich zu industriellen High-End-Lösungen.
Technische Spezifikationen im Detail
Der RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast vereint fortschrittliche Technologie mit bewährter Mechanik, um Ihren Anforderungen gerecht zu werden.
| Merkmal | Spezifikation |
|---|---|
| Modellbezeichnung | RM-X52-TNL – OpenManipulator |
| Maximale Nutzlast | 50g |
| Typische Gelenkoptionen | 3-DOF (Degrees of Freedom) oder 4-DOF, je nach Konfiguration. Ermöglicht komplexe räumliche Bewegungen. |
| Antriebssystem | Hochpräzise Getriebemotoren (z.B. Schrittmotoren oder Servomotoren) für präzise Steuerung und Drehmomentübertragung. |
| Material der Struktur | Leichtbau-Legierungen (z.B. Aluminium) und hochfeste Kunststoffe für ein optimales Verhältnis von Steifigkeit zu Gewicht. |
| Schnittstellen für Steuerung | Offene Schnittstellen (z.B. digitale I/O, serielle Kommunikation wie UART) zur Integration mit Mikrocontrollern (Arduino, Raspberry Pi etc.) und PCs. |
| Betriebstemperatur | Standard-Büroumgebungen, typischerweise 0°C bis 40°C. |
| Wiederholgenauigkeit | Im Bereich von wenigen Zehntelmillimetern, abhängig von der Kalibrierung und den Lastbedingungen. |
Anwendungsgebiete: Wo der RM-X52-TNL glänzt
Der RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast ist konzipiert für Szenarien, die ein hohes Maß an Präzision und Flexibilität erfordern, ohne die Notwendigkeit extrem hoher Traglasten. Seine offene Architektur macht ihn zu einem Favoriten in:
Forschung und Entwicklung
In akademischen und industriellen F&E-Laboren ermöglicht der RM-X52-TNL die Automatisierung von repetitiven oder physisch anspruchsvollen Experimenten. Von der präzisen Handhabung von Zellkulturen bis hin zur Montage von Mikrosystemen – die Anpassungsfähigkeit des OpenManipulators erlaubt die schnelle Erstellung von Prototypen und die Validierung von neuen Verfahren.
Bildung und Lehre
Als pädagogisches Werkzeug bietet der RM-X52-TNL Studenten die Möglichkeit, sich intensiv mit den Prinzipien der Robotik, Kinematik und Automatisierung auseinanderzusetzen. Die offene Plattform fördert das Verständnis für Software-Steuerung, Sensorintegration und die praktische Anwendung von Algorithmen.
Kleine Elektronikfertigung und Prototyping
Für kleine Produktionsserien oder das Prototyping von elektronischen Geräten ist der RM-X52-TNL ideal für Aufgaben wie das Platzieren von SMD-Bauteilen, das Aufbringen von Klebstoff oder das Verbinden von Kabeln. Seine kompakte Größe und präzise Bewegungssteuerung minimieren Fehler und steigern die Effizienz.
Industrielle Automatisierung (spezialisierte Anwendungen)
Auch in spezialisierten industriellen Nischen, wo kleine, präzise Bewegungen mit geringer Last gefragt sind, kann der RM-X52-TNL seine Stärken ausspielen. Dies kann die Handhabung von Prüfspitzen, das Justieren von optischen Komponenten oder die Montage von feinen mechanischen Teilen umfassen.
Vielseitigkeit durch offene Software-Architektur
Ein entscheidender Vorteil des RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast ist seine offene Natur. Dies bedeutet, dass Sie nicht an proprietäre Software gebunden sind. Stattdessen können Sie den Roboterarm nahtlos in gängige Entwicklungsumgebungen wie ROS (Robot Operating System), Python, C++ oder andere Steuerungsumgebungen integrieren. Diese Flexibilität ermöglicht:
- Entwicklung kundenspezifischer Steuerungsalgorithmen.
- Integration fortschrittlicher Bildverarbeitungssysteme zur Objekterkennung und -lokalisierung.
- Synchronisation mit anderen Automatisierungskomponenten.
- Erstellung komplexer Bewegungstrajektorien.
FAQ – Häufig gestellte Fragen zu RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast
F: Welche Art von Motoren werden im RM-X52-TNL verwendet?
A: Der RM-X52-TNL verwendet typischerweise hochpräzise Getriebemotoren, wie Schrittmotoren oder Servomotoren. Diese Motoren bieten die notwendige Präzision und das Drehmoment für genaue Bewegungssteuerungen. Die genaue Art der Motoren kann je nach spezifischer Konfiguration des Manipulators variieren.
F: Ist der RM-X52-TNL mit Standard-Mikrocontrollern wie Arduino oder Raspberry Pi kompatibel?
A: Ja, absolut. Der RM-X52-TNL ist als OpenManipulator konzipiert und verfügt über offene Schnittstellen, die eine einfache Integration mit gängigen Mikrocontrollern wie Arduino und Raspberry Pi ermöglichen. Dies erlaubt Ihnen, eigene Steuerungslogik zu entwickeln und den Roboterarm nach Ihren Wünschen zu programmieren.
F: Welche Software wird zur Steuerung des RM-X52-TNL benötigt?
A: Da es sich um einen OpenManipulator handelt, sind Sie nicht auf eine spezifische Software festgelegt. Sie können ihn mit einer Vielzahl von Programmiersprachen und Frameworks steuern, darunter Python, C++, MATLAB oder ROS (Robot Operating System). Dies gibt Ihnen die Freiheit, die für Ihr Projekt am besten geeignete Entwicklungsumgebung zu wählen.
F: Wie wird die Nutzlast von 50g am besten eingehalten?
A: Die angegebene Nutzlast von 50g bezieht sich auf das Gewicht, das der Manipulator am Ende seines Greifers oder Werkzeugs tragen kann, während er seine Präzision und Stabilität beibehält. Für optimale Ergebnisse sollte die Last gleichmäßig verteilt und das Werkzeug so nah wie möglich am Endeffektor des Arms positioniert werden. Vermeiden Sie ruckartige Bewegungen bei voller Last.
F: Kann der RM-X52-TNL für Aufgaben außerhalb des Labors verwendet werden?
A: Während der RM-X52-TNL primär für präzise Aufgaben in kontrollierten Umgebungen wie Laboren, Bildungsstätten oder kleinen Fertigungsbereichen konzipiert ist, kann er bei entsprechender Anpassung und gegebenenfalls Schutzmaßnahmen auch in spezifischen industriellen Nischen eingesetzt werden, solange die Umgebungsbedingungen seinen Spezifikationen entsprechen.
F: Bietet der RM-X52-TNL eine integrierte Kamera oder Sensorik?
A: Der RM-X52-TNL – OpenManipulator, RM-X52-TNL, 50g Nutzlast wird typischerweise ohne integrierte Kameras oder fortgeschrittene Sensorik geliefert, um die Kosten niedrig zu halten und maximale Flexibilität bei der Auswahl von Peripheriegeräten zu ermöglichen. Er verfügt jedoch über Schnittstellen, die die einfache Anbindung von Kameras, Kraftsensoren oder anderen Messinstrumenten erlauben.
F: Wie wichtig ist die Kalibrierung für die Genauigkeit des RM-X52-TNL?
A: Die Kalibrierung ist für die Aufrechterhaltung der maximalen Genauigkeit und Wiederholgenauigkeit des RM-X52-TNL von entscheidender Bedeutung. Eine korrekte Kalibrierung stellt sicher, dass die tatsächliche Position des Endeffektors mit den vom Steuerungssystem befohlenen Positionen übereinstimmt. Regelmäßige Kalibrierungsprüfungen, insbesondere nach Transporte oder mechanischen Beanspruchungen, sind empfehlenswert.