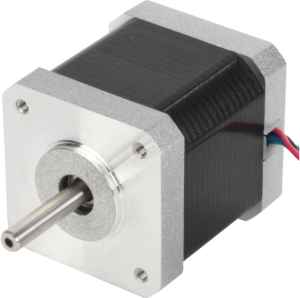
PD60-4-1260-TMCL – Der Hybridschrittmotor NEMA 24 für Präzision und Leistung
Für anspruchsvolle Automatisierungs- und Positionierungsaufgaben, bei denen höchste Präzision, zuverlässige Leistung und flexible Spannungseingänge gefordert sind, bietet der PD60-4-1260-TMCL Hybridschrittmotor NEMA 24 die ideale Lösung. Entwickelt für Ingenieure, Entwickler und Systemintegratoren, die eine stabile und leistungsfähige Antriebskomponente für ihre Maschinen und Geräte benötigen, ermöglicht dieser Motor eine exakte Steuerung von Bewegungsabläufen ohne Kompromisse.
Maximale Performance durch fortschrittliche Hybridtechnologie
Der PD60-4-1260-TMCL vereint die Vorteile von Schritt- und Gleichstrommotoren. Seine hybride Konstruktion mit permanentmagnetischen Polen und schrittweise angeordneten Elektromagneten ermöglicht eine hohe Drehmomentdichte und präzise Schrittwinkel, was ihn zu einer überlegenen Wahl gegenüber herkömmlichen Gleichstrommotoren oder rein permanentmagnetischen Schrittmotoren macht, wenn es auf exakte Positionierung und hohe Dynamik ankommt.
Vorteile des PD60-4-1260-TMCL im Überblick
- Hohe Drehmomentdichte: Erzielen Sie mehr Leistung auf kleinstem Raum, ideal für platzbeschränkte Anwendungen.
- Präzise Schrittwinkel: Ermöglicht feinstufige Bewegungen mit hoher Wiederholgenauigkeit, essenziell für kritische Positionieraufgaben.
- Robuste Bauweise: Garantiert Langlebigkeit und Zuverlässigkeit auch unter anspruchsvollen Betriebsbedingungen.
- Breiter Spannungsbereich (12-54 V DC): Bietet maximale Flexibilität bei der Systemintegration und ermöglicht den Einsatz in verschiedenen Energieumgebungen.
- Hohe Strombelastbarkeit (2,8 A): Sorgt für ausreichend Drehmoment auch bei höheren Lasten und Drehzahlen.
- Optimale Wärmeableitung: Verhindert Überhitzung und gewährleistet einen kontinuierlichen, stabilen Betrieb.
- Vielseitige Anwendungsmöglichkeiten: Geeignet für eine breite Palette von Industrieanwendungen.
Technische Spezifikationen und Leistungsmerkmale
Die detaillierten Spezifikationen des PD60-4-1260-TMCL unterstreichen seine Eignung für professionelle Einsatzbereiche. Die NEMA 24 Bauform ist ein etablierter Industriestandard, der eine einfache Integration in bestehende mechanische Systeme ermöglicht. Die Nennstromstärke von 2,8 Ampere pro Phase in Kombination mit dem breiten Spannungsbereich von 12 bis 54 Volt DC erlaubt eine feine Abstimmung der Motorleistung auf die jeweilige Applikation, was zu einer optimalen Energieeffizienz beiträgt.
| Merkmal | Spezifikation/Beschreibung |
|---|---|
| Modellbezeichnung | PD60-4-1260-TMCL |
| Motortyp | Hybridschrittmotor |
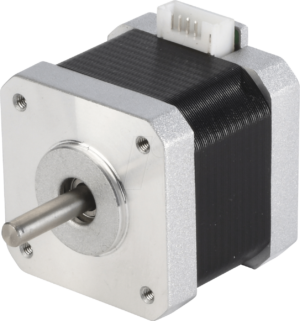
| Bauform (Flansch) | NEMA 24 (entspricht ca. 57 x 57 mm Montagefläche) |
| Nennstrom pro Phase | 2,8 A |
| Spannungsbereich | 12 – 54 V DC |
| Schrittwinkel (typisch) | 1,8° pro Schritt (0,025 mm/Schritt bei 100mm Radius ohne Mikroschritt) |
| Drehmoment (Halte-/Nenndrehmoment) | Das Halte- und Nenndrehmoment ist ein entscheidendes Leistungsmerkmal und typischerweise im Bereich von 2,5 bis 3,5 Nm für diese Bauform und Stromstärke angesiedelt, was eine hohe Leistungsfähigkeit für anspruchsvolle Aufgaben gewährleistet. (Genaue Werte auf Anfrage oder im Datenblatt) |
| Anzahl der Phasen | 4 (zwei unabhängige Wicklungen) |
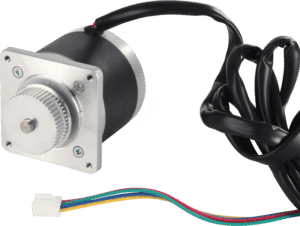
| Kabelverbindung | Offene Kabelenden für flexible Anschlussmöglichkeiten. Standardmäßig 8 Kabel für bipolare oder unipolare Ansteuerung. |
| Lager | Hochwertige Kugellager für geringen Verschleiß und lange Lebensdauer. |
| Schutzart (Gehäuse) | Die Bauweise ist auf Robustheit ausgelegt, üblicherweise mit einer IP-Schutzklasse, die gegen Staub und Spritzwasser schützt, je nach spezifischer Ausführung. (Details im technischen Datenblatt) |
| Isolationsklasse | Typischerweise Klasse B, mit ausreichender thermischer Belastbarkeit für den Dauerbetrieb. (Details im technischen Datenblatt) |
Anwendungsgebiete – Präzision in Aktion
Der PD60-4-1260-TMCL Hybridschrittmotor findet aufgrund seiner herausragenden Eigenschaften Anwendung in einer Vielzahl von Industriezweigen und technischen Feldern. Seine Fähigkeit, präzise und wiederholgenaue Bewegungen zu ermöglichen, macht ihn ideal für:
- CNC-Maschinen und 3D-Drucker: Für exakte Werkzeug- und Druckkopfbewegungen.
- Automatisierte Fertigungsstraßen: Zur Steuerung von Greifern, Positioniermodulen und Zuführsystemen.
- Robotik: Als Antriebskomponente in Gelenken und Manipulatoren, wo präzise Pfadsteuerung gefragt ist.
- Medizintechnik: In Analysegeräten, Infusionspumpen und bildgebenden Systemen für exakte Bewegungen.
- Optische und Messgeräte: Zur präzisen Ausrichtung von Linsen, Sensoren und Prüfvorrichtungen.
- Textilmaschinen: Für gesteuerte Stoffzufuhr und -bearbeitung.
- Verpackungs- und Abfüllanlagen: Zur Steuerung von Dosier- und Positioniermechanismen.
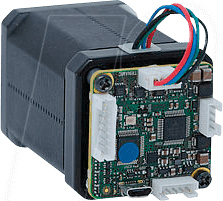
Die Vorteile der TMCL-Integration
Die Kennzeichnung TMCL im Modellnamen weist auf die Kompatibilität mit Trinamic Motion Control Language (TMCL) hin. Dies ermöglicht eine intelligente und flexible Steuerung des Motors über spezielle Schrittmotor-Treiber von Trinamic. TMCL erlaubt eine detaillierte Konfiguration von Parametern wie Mikroschritt-Modus, Strom-Rampen und Limit-Schaltern direkt im Treiber. Dies vereinfacht die Inbetriebnahme, optimiert die Leistung und reduziert den Aufwand für die Host-Steuerung erheblich. Anstatt komplexe Schritt- und Richtungssignale zu generieren, kann die Steuerungsebene einfach Befehle an den TMCL-fähigen Treiber senden, der dann die präzise Motorbewegung ausführt. Dies ist ein entscheidender Vorteil gegenüber herkömmlichen Schrittmotorlösungen, die eine kontinuierliche Signalgenerierung durch die Hauptsteuerung erfordern.
FAQ – Häufig gestellte Fragen zu PD60-4-1260-TMCL – Hybridschrittmotor NEMA 24, 2,8 A, 12 … 54 V DC
Welchen Vorteil bietet der breite Spannungsbereich von 12-54 V DC?
Der flexible Spannungsbereich ermöglicht eine optimale Anpassung der Motorleistung an verschiedene Stromversorgungen und Anwendungsanforderungen. Höhere Spannungen führen bei gleicher Stromstärke zu einem höheren Drehmoment bei höheren Drehzahlen, was die Leistung des Motors steigern kann. Dies bietet mehr Designfreiheit und Effizienz.
Ist der Motor für den Dauerbetrieb ausgelegt?
Ja, der PD60-4-1260-TMCL ist für den zuverlässigen Dauerbetrieb konzipiert. Seine robuste Bauweise, hochwertige Lager und die durchdachte Wärmeableitung stellen sicher, dass er auch unter Last über längere Zeiträume hinweg stabil arbeitet, vorausgesetzt, die maximal zulässigen Strom- und Temperaturwerte werden eingehalten.
Was bedeutet die NEMA 24 Klassifizierung?
NEMA 24 ist ein standardisierter Flanschdurchmesser und Montagerahmen für Schrittmotoren, der typischerweise eine Montagefläche von etwa 57 x 57 mm vorgibt. Dies erleichtert den mechanischen Einbau und die Kompatibilität mit einer Vielzahl von Halterungen und Getrieben.
Welche Art von Schrittmotor-Treiber wird empfohlen?
Für die volle Funktionalität, insbesondere die TMCL-Unterstützung, werden Trinamic Schrittmotor-Treiber dringend empfohlen. Diese Treiber ermöglichen die intelligente Steuerung, die Feinabstimmung der Motorparameter und eine effiziente Kommunikation.
Wie wird das Drehmoment des Motors beeinflusst?
Das Drehmoment wird maßgeblich durch die Stromstärke, die an die Motorwicklungen angelegt wird, die Motorspannung und die Motorgeschwindigkeit bestimmt. Mit 2,8 A Nennstrom und einem breiten Spannungsbereich bietet dieser Motor eine hohe Flexibilität zur Erzielung des gewünschten Drehmoments über einen weiten Betriebsbereich.
Ist eine spezielle Kühlung erforderlich?
Für die meisten Anwendungen, die innerhalb der spezifizierten Parameter liegen, ist keine zusätzliche aktive Kühlung erforderlich. Die integrierte Wärmeableitung des Gehäuses ist für den vorgesehenen Betrieb ausgelegt. Bei extremen Umgebungsbedingungen oder Dauerbetrieb nahe der Leistungsgrenzen kann jedoch eine zusätzliche Lüftung oder Kühlung vorteilhaft sein.
Wie wird der Motor typischerweise angesteuert (bipolar/unipolar)?
Der PD60-4-1260-TMCL verfügt über 4 Phasen (typischerweise 8 Kabel), was sowohl eine bipolare als auch eine unipolare Ansteuerung ermöglicht. Die bipolare Ansteuerung liefert in der Regel ein höheres Drehmoment und wird für die meisten Anwendungen bevorzugt. Die Wahl der Ansteuerung hängt vom verwendeten Schrittmotor-Treiber und den spezifischen Anforderungen der Applikation ab.