PD42-4-1240-CAN – Der Präzisions-Hybridschrittmotor für anspruchsvolle Automatisierung und Robotik
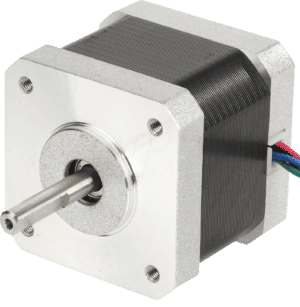
Für Entwickler, Ingenieure und Automatisierungsexperten, die in ihren Projekten höchste Präzision, Zuverlässigkeit und nahtlose Integration suchen, löst der PD42-4-1240-CAN – Hybridschrittmotor NEMA 17, 2 A, 10 … 30 V DC das Problem von ungenauer Steuerung und komplexer Verkabelung. Dieser Motor ist die ideale Wahl für Anwendungen, die eine exakte Positionierung und ein robustes Kommunikationsprotokoll erfordern, ohne Kompromisse bei Leistung und Effizienz einzugehen.
Überlegene Leistung und Integration: Warum PD42-4-1240-CAN?
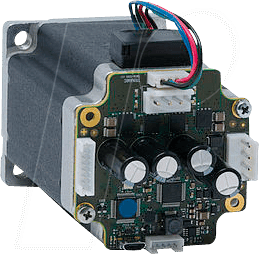
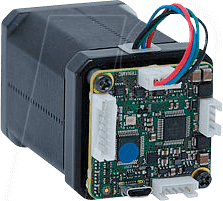
Der PD42-4-1240-CAN setzt sich von Standardlösungen durch seine fortschrittliche Hybridtechnologie, die integrierte CAN-Bus-Kommunikation und seine optimierte Leistungsfähigkeit ab. Während herkömmliche Schrittmotoren oft separate Treiber und eine aufwendige Verdrahtung benötigen, bietet dieses Modell eine All-in-One-Lösung, die Installation vereinfacht, Fehlerquellen minimiert und die Systemleistung maximiert. Die CAN-Bus-Schnittstelle ermöglicht eine effiziente und störungsfreie Kommunikation im Netzwerk, was ihn perfekt für verteilte Steuerungssysteme in industriellen Umgebungen oder komplexen Robotik-Anwendungen macht. Die robuste Bauweise und die präzise Fertigung gewährleisten eine lange Lebensdauer und konstante Leistung, selbst unter anspruchsvollen Betriebsbedingungen.
Technische Exzellenz und innovative Features
Der PD42-4-1240-CAN repräsentiert die Spitze der Hybridschrittmotoren-Technologie. Seine Konstruktion kombiniert die Vorteile von Schrittmotoren und Gleichstrommotoren, um eine hohe Drehmomentdichte, gute Drehzahlkontrolle und präzise Schrittauflösung zu bieten. Die NEMA 17-Bauform gewährleistet eine einfache Montage und Kompatibilität mit einer breiten Palette von mechanischen Befestigungen und Getrieben. Die Stromaufnahme von 2 A pro Phase ermöglicht eine signifikante Leistungsabgabe, während der weite Eingangsspannungsbereich von 10 bis 30 V DC eine flexible Integration in bestehende Stromversorgungen erlaubt.
Vorteile des PD42-4-1240-CAN für Ihre Projekte
- Präzise Schrittauflösung: Ermöglicht exakte Positionierung und Wiederholgenauigkeit für anspruchsvolle Bewegungssteuerungsaufgaben.
- Integrierte CAN-Bus-Schnittstelle: Vereinfacht die Systemintegration durch standardisierte, digitale Kommunikation, reduziert Verkabelungsaufwand und erhöht die Störfestigkeit.
- Hohes Drehmoment: Bietet ausreichende Kraft für Anwendungen, die das Bewegen von Lasten oder das Überwinden von Widerständen erfordern.
- Robuste Bauweise: Gefertigt für den zuverlässigen Einsatz in industriellen Umgebungen und anspruchsvollen mechanischen Systemen.
- Breiter Spannungsbereich: Flexibilität bei der Stromversorgung, passend für diverse Systemkonfigurationen.
- NEMA 17 Standard: Gewährleistet einfache mechanische Integration und Kompatibilität mit gängigen Montagesystemen und Zubehörteilen.
- Effiziente Wärmeableitung: Optimiertes Design sorgt für eine effektive Wärmeabfuhr und verhindert Überhitzung, was die Lebensdauer des Motors verlängert.
- Optimale Leistung bei 2 A: Bietet ein ausgewogenes Verhältnis zwischen Leistung, Energieverbrauch und Wärmeentwicklung für vielfältige Einsatzszenarien.
Umfassende Spezifikationen und Einsatzmöglichkeiten
Der PD42-4-1240-CAN ist mehr als nur ein Motor; er ist ein integraler Bestandteil intelligenter Steuerungssysteme. Die Möglichkeit, über CAN-Bus zu kommunizieren, eröffnet neue Dimensionen der dezentralen Intelligenz und der Vernetzung von Komponenten. Dies ist besonders vorteilhaft in Bereichen wie der industriellen Automatisierung, wo mehrere Achsen synchronisiert werden müssen, oder in der Robotik, wo eine präzise und reaktionsschnelle Bewegungssteuerung entscheidend ist. Seine hohe Schrittgenauigkeit und das kräftige Drehmoment machen ihn zur ersten Wahl für präzise Positionieraufgaben, von der Fertigungsautomatisierung bis hin zu spezialisierten Laborgeräten.
| Eigenschaft | Detail |
|---|---|
| Motortyp | Hybridschrittmotor |
| Bauform | NEMA 17 |
| Nennstrom pro Phase | 2 A |
| Betriebsspannung | 10 – 30 V DC |
| Kommunikationsschnittstelle | CAN-Bus |
| Schrittwinkel | Standardmäßig 1.8° (200 Schritte pro Umdrehung), präzise abstimmbar über Mikroschritt-Ansteuerung. |
| Drehmoment | Optimiert für seine Klasse, ermöglicht präzise Bewegungen und das Halten von Lasten in Position. Das Halte- und Losbrechmoment sind typisch hoch für Hybridschrittmotoren dieser Größe. |
| Isolationsklasse | Typischerweise Klasse B oder höher, was eine gute thermische Belastbarkeit und Zuverlässigkeit gewährleistet. |
| Schutzart | Konstruktion üblicherweise ausgelegt für Umgebungen mit moderatem Staub- und Spritzwasserschutz, für spezielle Anwendungen können zusätzliche Schutzmaßnahmen erforderlich sein. |
| Material und Haptik | Robustes Aluminiumgehäuse für Langlebigkeit und effiziente Wärmeableitung. Hochwertige Lager für geringe Reibung und lange Lebensdauer. |
| Design-Merkmale | Kompakte Bauform für einfache Integration. Integrierte CAN-Bus-Schnittstelle reduziert externen Verkabelungsaufwand. Standardisierte Anschlussstecker für einfache Konnektivität. |
| Einsatzmöglichkeiten | Industrielle Automatisierung, Robotik (z.B. Gelenkarme, mobile Plattformen), CNC-Maschinen, 3D-Drucker (professionelle Anwendungen), Präzisions-Messtechnik, Laborautomatisierung, Medizintechnik. |
Erweiterte Anwendungsbereiche und Systemintegration
Die CAN-Bus-Integration des PD42-4-1240-CAN ermöglicht eine nahtlose Einbindung in bestehende oder neue vernetzte Systeme. Dies vereinfacht die Entwicklung komplexer Maschinenarchitekturen erheblich, da mehrere Motoren und Sensoren über ein einziges Kommunikationsprotokoll gesteuert und überwacht werden können. Die erhöhte Datenübertragungsrate und die Robustheit des CAN-Bus-Protokolls minimieren das Risiko von Kommunikationsfehlern, was für sicherheitskritische Anwendungen unerlässlich ist. Die Möglichkeit, den Motor über den CAN-Bus zu konfigurieren und Diagnosedaten abzurufen, erlaubt eine vorausschauende Wartung und eine schnelle Fehlerbehebung.
FAQ – Häufig gestellte Fragen zu PD42-4-1240-CAN – Hybridschrittmotor NEMA 17, 2 A, 10 … 30 V DC
Was ist der Hauptvorteil der CAN-Bus-Schnittstelle bei diesem Hybridschrittmotor?
Der Hauptvorteil der CAN-Bus-Schnittstelle ist die vereinfachte und robustere Systemintegration. Sie ermöglicht eine störungsfreie digitale Kommunikation zwischen dem Motor und der Steuereinheit sowie anderen Geräten im Netzwerk, reduziert den Verkabelungsaufwand und ermöglicht fortschrittliche Diagnosefunktionen.
Ist dieser Motor für den Einsatz in Umgebungen mit hoher Staub- oder Feuchtigkeitsbelastung geeignet?
Der PD42-4-1240-CAN ist für den Einsatz in typischen Industrieumgebungen konzipiert und verfügt über eine robuste Bauweise. Für Umgebungen mit extremer Staub- oder Feuchtigkeitsbelastung können jedoch zusätzliche Schutzmaßnahmen wie Gehäuse oder spezielle Steckverbinder erforderlich sein, um die vorgesehene Schutzart zu erreichen.
Welche Art von Anwendungen eignet sich besonders gut für diesen Motor?
Dieser Motor ist ideal für Anwendungen, die hohe Präzision bei der Positionierung und eine zuverlässige Steuerung erfordern. Dazu gehören industrielle Automatisierungsaufgaben, Robotik, CNC-Maschinen, präzise Mess- und Positioniersysteme sowie spezialisierte Geräte in der Medizintechnik.
Kann der Motor mit verschiedenen Schrittwinkeln betrieben werden?
Der Grundschrittwinkel des Motors beträgt standardmäßig 1.8 Grad, was 200 Schritten pro Umdrehung entspricht. Durch die Ansteuerung mit Mikroschritt-Technik kann die Schrittauflösung jedoch deutlich erhöht werden, um eine noch feinere und gleichmäßigere Bewegung zu erzielen.
Wie beeinflusst die angegebene Betriebsspannung den Betrieb des Motors?
Der breite Betriebsspannungsbereich von 10 bis 30 V DC bietet Flexibilität bei der Stromversorgung. Eine höhere Spannung innerhalb dieses Bereichs kann unter Umständen eine höhere Drehzahl bei gleichem Drehmoment ermöglichen, erfordert jedoch eine entsprechende Ansteuerung und Kühlung.
Ist ein separater Schrittmotor-Treiber für diesen Motor erforderlich?
Obwohl die CAN-Bus-Schnittstelle die Kommunikation übernimmt, benötigt der Motor selbst eine geeignete Ansteuerungselektronik, die die Stromimpulse für die Spulen liefert und die Mikroschritt-Funktionalität ermöglicht. Die genauen Anforderungen an den Treiber sind von der Implementierung und der gewünschten Leistung abhängig.
Wie wird das Drehmoment des Motors in der Praxis spezifiziert?
Das Drehmoment wird üblicherweise in Newton-Zentimetern (Nm) oder Gramm-Zentimetern (gcm) angegeben. Der PD42-4-1240-CAN bietet ein signifikantes Halte- und Losbrechmoment für seine NEMA 17-Größe, das für präzise Positionieraufgaben ausreichend ist. Spezifische Drehmomentwerte finden Sie im technischen Datenblatt des Herstellers.