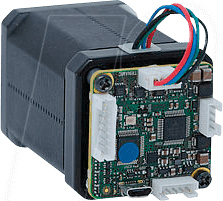
Präzisionssteuerung für anspruchsvolle Automatisierungsaufgaben: PD42-2-1240-CAN Hybridschrittmotor NEMA 17
Für Ingenieure, Automatisierungsexperten und Entwickler, die höchste Präzision und Zuverlässigkeit bei der Bewegungskontrolle benötigen, bietet der PD42-2-1240-CAN Hybridschrittmotor NEMA 17 die ideale Lösung. Dieses fortschrittliche Antriebselement überwindet die Limitierungen herkömmlicher Schrittmotoren durch die Integration von CAN-Bus-Kommunikation und optimierter Leistungsfähigkeit, was ihn zur perfekten Wahl für komplexe industrielle Automatisierungssysteme, Robotik-Anwendungen und anspruchsvolle Maschinensteuerungen macht, wo exakte Positionierung und synchronisierte Abläufe unabdingbar sind.
Maximale Performance durch fortschrittliche Hybridtechnologie
Der PD42-2-1240-CAN ist ein Hybridschrittmotor, der die Vorteile von Schrittmotoren – präzise Schrittauflösung und einfache Steuerung – mit den Vorteilen von Gleichstrommotoren – hohes Drehmoment bei niedrigen Drehzahlen und verbesserte Effizienz – kombiniert. Diese synergetische Bauweise ermöglicht eine herausragende Leistung, die Standard-Schrittmotoren in vielen Anwendungsbereichen übertrifft. Die präzise Schrittauflösung garantiert eine exakte Winkelpositionierung, während das hohe Haltemoment auch unter Last für Stabilität sorgt. Dies ist entscheidend für Prozesse, bei denen jede Bewegung zählt und Abweichungen nicht toleriert werden können. Die Leistungsklasse mit 2 A und einem Spannungsbereich von 10 bis 30 V DC ermöglicht eine flexible Integration in unterschiedlichste Stromversorgungsarchitekturen und gewährleistet gleichzeitig ausreichend Kraft für anspruchsvolle Anwendungen.
Vorteile des PD42-2-1240-CAN im Überblick
- Höchste Präzision und Wiederholgenauigkeit: Ermöglicht exakte Bewegungsabläufe und Positionierungen, die für kritische Prozessschritte unerlässlich sind.
- Robuste Bauweise für industrielle Umgebungen: Konzipiert für den zuverlässigen Betrieb auch unter anspruchsvollen Bedingungen, was die Lebensdauer und Betriebssicherheit erhöht.
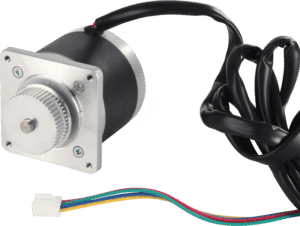
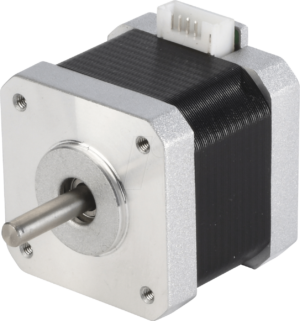
- Integrierte CAN-Bus-Kommunikation: Vereinfacht die Vernetzung und Steuerung in komplexen Automatisierungssystemen, reduziert Verkabelungsaufwand und ermöglicht eine effiziente Datenübertragung.
- Optimiertes Drehmoment-Drehzahl-Verhalten: Bietet signifikantes Haltemoment bei niedrigen Drehzahlen und eine gute Leistung über einen breiten Drehzahlbereich.
- Energieeffizienz: Durch die fortschrittliche Technologie wird eine verbesserte Energieeffizienz im Vergleich zu älteren Motorkonzepten erreicht, was zu geringeren Betriebskosten beiträgt.
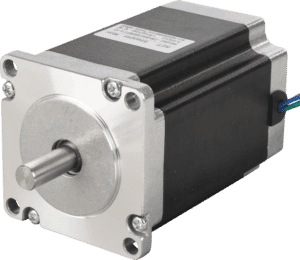
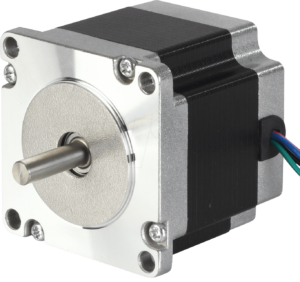
- Kompakte Bauform (NEMA 17): Die standardisierte NEMA 17 Bauform ermöglicht eine einfache Integration in bestehende oder neue Konstruktionen und bietet eine hohe Leistungsdichte.
Technische Spezifikationen und Konstruktionsmerkmale
Der PD42-2-1240-CAN zeichnet sich durch eine solide Konstruktion aus, die auf Langlebigkeit und maximale Leistung ausgelegt ist. Das Gehäusematerial ist auf thermische Stabilität und mechanische Robustheit ausgelegt, um eine zuverlässige Wärmeableitung zu gewährleisten und die Lebensdauer der internen Komponenten zu maximieren. Die Lagertypen sind sorgfältig ausgewählt, um Reibung zu minimieren und eine gleichmäßige Rotation über die gesamte Lebensdauer des Motors zu ermöglichen. Die Wicklungsanordnung und die Magnetmaterialien sind optimiert, um ein hohes spezifisches Drehmoment bei minimaler Stromaufnahme zu erzielen. Die Schnittstellen für die CAN-Bus-Kommunikation sind standardisiert und robust ausgeführt, um eine sichere und störungsfreie Datenübertragung zu gewährleisten. Die elektrischen Anschlüsse sind für eine einfache und sichere Verkabelung konzipiert, was den Installationsprozess beschleunigt und das Risiko von Fehlverdrahtungen minimiert.
| Merkmal | Beschreibung |
|---|---|
| Bauform (Schrittwinkel/Schrittmotor-Standard) | NEMA 17, präzise Schrittauflösung für feinfühlige Bewegungen |
| Nennstrom pro Phase | 2 A, ermöglicht hohes Drehmoment bei effizienter Energienutzung |
| Versorgungsspannung | 10 – 30 V DC, flexibel einsetzbar in verschiedenen Stromversorgungssystemen |
| Kommunikationsschnittstelle | CAN-Bus (Controller Area Network), für dezentrale und vernetzte Steuerungen |
| Anwendungsspektrum | Industrielle Automatisierung, Robotik, CNC-Maschinen, Präzisionspositionierungssysteme |
| Haltemoment (typisch) | Optimiert für die NEMA 17 Bauform und den Nennstrom, bietet starke Haltekraft |
| Gehäusematerial | Hochwertige Legierungen für thermische Stabilität und mechanische Belastbarkeit |
| Lagertypen | Präzisionskugellager für geringe Reibung und hohe Lebensdauer |
Integration in komplexe Automatisierungssysteme
Die Integration des PD42-2-1240-CAN in bestehende oder neue Automatisierungslösungen wird durch die CAN-Bus-Schnittstelle erheblich vereinfacht. CAN-Bus ist ein robuster, serieller Kommunikationsbus, der ursprünglich für den Einsatz in Fahrzeugen entwickelt wurde, sich aber aufgrund seiner Zuverlässigkeit und Effizienz auch in industriellen Umgebungen etabliert hat. Er ermöglicht eine bidirektionale Kommunikation zwischen verschiedenen Geräten in einem Netzwerk, ohne dass ein zentraler Mastercontroller zwingend erforderlich ist. Dies reduziert die Komplexität der Verkabelung, da nur ein einziges Buskabel zur Verbindung mehrerer Geräte benötigt wird. Die Datenübertragung ist durch Protokolle wie CAN 2.0A/B oder CAN FD sicher und fehlerresistent. Der PD42-2-1240-CAN lässt sich nahtlos in Steuerungen integrieren, die CAN-Bus unterstützen, wie beispielsweise speicherprogrammierbare Steuerungen (SPS), industrielle PCs oder dedizierte Motion Controller. Die Möglichkeit, Motorparameter wie Geschwindigkeit, Beschleunigung und Zielposition über den CAN-Bus zu übertragen, eröffnet ein Höchstmaß an Flexibilität bei der Programmierung und Steuerung. Dies ermöglicht die Implementierung von komplexen Bewegungsabläufen, Synchronisationen mehrerer Motoren und die Rückmeldung von Statusinformationen in Echtzeit. Die hohe Schrittauflösung des Motors, oft durch Mikroschrittbetrieb weiter verfeinert, sorgt für ruckfreie und präzise Bewegungen, die für Anwendungen wie präzise Fertigungsprozesse, Verpackungsmaschinen oder optische Inspektionssysteme unerlässlich sind.
Anwendungsbereiche und Einsatzmöglichkeiten
Der PD42-2-1240-CAN Hybridschrittmotor NEMA 17 eignet sich hervorragend für eine breite Palette von anspruchsvollen Anwendungen. In der industriellen Automatisierung spielt er seine Stärken bei der präzisen Steuerung von Förderbändern, Dosiersystemen und Materialhandling-Robotern aus. Seine Fähigkeit, exakte Positionen zu halten und zuverlässig zu reproduzieren, macht ihn unverzichtbar für Produktionslinien, bei denen Konsistenz und Präzision oberste Priorität haben. In der Robotik ermöglicht der Motor die feingliedrige Steuerung von Roboterarmen, Greifern und mobilen Plattformen, wo schnelle und genaue Bewegungsabläufe für die Interaktion mit der Umgebung entscheidend sind. Für CNC-Maschinen bietet der Motor die notwendige Präzision und das Drehmoment für Fräs-, Dreh- und Gravurprozesse, um höchste Oberflächengüten und Maßhaltigkeit zu erzielen. Darüber hinaus findet er Einsatz in medizinischen Geräten, wo die präzise Steuerung von Flüssigkeitspumpen, bildgebenden Systemen oder Laborautomaten kritisch ist. Auch im Bereich der Labor- und Messtechnik, beispielsweise bei automatisierten Probenwechslern oder Positioniertischen für optische Sensoren, leistet der PD42-2-1240-CAN wertvolle Dienste. Die Kombination aus NEMA 17 Standardgröße und integrierter CAN-Bus-Konnektivität erleichtert die Nachrüstung bestehender Systeme sowie die Entwicklung neuer, hochmoderner Automatisierungslösungen.
FAQ – Häufig gestellte Fragen zu PD42-2-1240-CAN – Hybridschrittmotor NEMA 17, 2 A, 10 … 30 V DC
Was bedeutet NEMA 17?
NEMA 17 ist eine standardisierte Bauform für Schrittmotoren, die sich auf die Abmessungen des Motorgehäuses bezieht. Konkret gibt NEMA 17 an, dass die Montagefläche des Motors ein Quadrat mit einer Kantenlänge von 1,7 Zoll (ca. 43,18 mm) hat. Dies erleichtert die mechanische Integration des Motors in eine Vielzahl von Maschinen und Geräten, da viele Halterungen und mechanische Komponenten nach diesem Standard gefertigt sind.
Welche Vorteile bietet die CAN-Bus-Kommunikation gegenüber herkömmlichen Steuerungen?
Die CAN-Bus-Kommunikation bietet gegenüber traditionellen seriellen oder parallelen Steuerungen mehrere entscheidende Vorteile. Sie ermöglicht eine dezentrale, robuste und effiziente Netzwerkkommunikation zwischen mehreren Geräten. Dies reduziert den Verkabelungsaufwand erheblich, da nur ein Buskabel zur Verbindung aller Teilnehmer benötigt wird. Zudem ist CAN-Bus sehr störungsresistent und ermöglicht die bidirektionale Datenübertragung in Echtzeit, was die Implementierung komplexer Steuerungslogiken und die Überwachung von Motorparametern vereinfacht.
Ist der PD42-2-1240-CAN auch für den Einsatz in rauen Umgebungen geeignet?
Ja, der PD42-2-1240-CAN ist für den Einsatz in industriellen Umgebungen konzipiert. Die robuste Bauweise mit hochwertigen Materialien und präzisen Lagern gewährleistet eine hohe Zuverlässigkeit und Langlebigkeit auch unter anspruchsvollen Bedingungen. Die spezifische IP-Schutzklasse, falls zutreffend, sollte jedoch für extreme Umgebungen wie Staub oder Flüssigkeiten geprüft werden.
Wie wird die Schrittauflösung des Motors bestimmt?
Die Schrittauflösung eines Schrittmotors wird durch seine interne Konstruktion bestimmt. Typischerweise hat ein zweiphasiger Hybridschrittmotor wie dieser einen Standard-Schrittwinkel von 1,8 Grad pro Vollschritt, was 200 Schritten pro Umdrehung entspricht. Durch den Einsatz von Mikroschritt-Treibern kann die Auflösung jedoch auf ein Vielfaches erhöht werden (z.B. 256 oder mehr Mikroschritte pro Vollschritt), was zu einer noch feinfühligeren und ruckfreieren Bewegung führt.
Welche Art von Steuergeräten sind mit dem PD42-2-1240-CAN kompatibel?
Der PD42-2-1240-CAN ist mit jedem Steuergerät kompatibel, das die CAN-Bus-Kommunikation unterstützt. Dazu gehören typischerweise speicherprogrammierbare Steuerungen (SPS), Industrie-PCs mit CAN-Schnittstellenkarten, dedizierte Motion Controller und viele andere Systeme, die in der industriellen Automatisierung und Robotik eingesetzt werden.
Was ist das Haltemoment eines Schrittmotors und warum ist es wichtig?
Das Haltemoment ist das maximale Drehmoment, das ein Schrittmotor aufbringen kann, um seine Position zu halten, wenn er bestromt, aber nicht in Bewegung ist. Es ist entscheidend, da es verhindert, dass die Last den Motor verstellt, wenn die Steuerung pausiert oder wenn äußere Kräfte auf die angetriebene Mechanik wirken. Ein ausreichend hohes Haltemoment gewährleistet die Stabilität des Systems und die Präzision der Positionierung.
Welche Rolle spielt die Versorgungsspannung (10-30 V DC) für die Leistung des Motors?
Die Versorgungsspannung beeinflusst die maximal erreichbare Drehzahl und das Drehmoment eines Schrittmotors. Eine höhere Versorgungsspannung ermöglicht eine schnellere Aufladung der Motorwicklungen, was zu einem besseren Drehmoment bei höheren Drehzahlen führt. Der Bereich von 10-30 V DC bietet Flexibilität, um den Motor an unterschiedliche Stromversorgungskonzepte anzupassen und gleichzeitig eine gute Leistungskurve über einen relevanten Arbeitsbereich sicherzustellen.