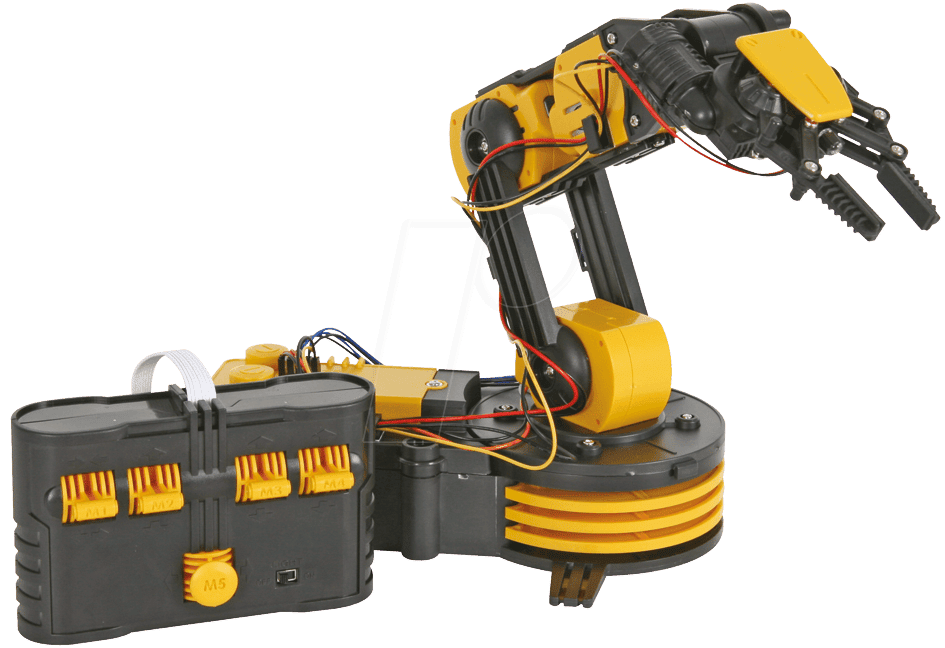
Entdecken Sie die Präzision: VEL KSR10 – Bausatz Roboterarm für ambitionierte Projekte
Der VEL KSR10 Bausatz Roboterarm wurde entwickelt, um sowohl Hobby-Elektronikern als auch angehenden Ingenieuren eine Plattform für die Realisierung komplexer mechanischer und automatisierter Aufgaben zu bieten. Wenn Sie nach einer robusten, flexiblen und lehrreichen Lösung suchen, um grundlegende Robotik-Konzepte zu verstehen und anzuwenden, dann ist dieser Bausatz die ideale Wahl, um Ihre technischen Visionen zum Leben zu erwecken.
Präzision und Kontrolle: Das Herzstück Ihrer Automatisierung
Der VEL KSR10 unterscheidet sich von einfachen DIY-Kits durch seine durchdachte Konstruktion und die Möglichkeit zur präzisen Steuerung. Anstatt auf instabile oder minderwertige Komponenten zu setzen, bietet dieser Bausatz eine solide mechanische Basis, die für wiederholbare Bewegungen und anspruchsvolle Aufgaben konzipiert ist. Er ermöglicht ein tiefgreifendes Verständnis von Kinematik, Steuerungstechnik und Programmierung, weit über das Niveau üblicher Lernspielzeuge hinaus.
Umfassende Vorteile des VEL KSR10 Bausatz Roboterarm
- Didaktischer Wert: Ideal für das Erlernen von Robotik-, Elektronik- und Programmiergrundlagen in einem praktischen Anwendungskontext.
- Robuste Konstruktion: Gefertigt aus hochwertigen Materialien für Langlebigkeit und Stabilität auch bei anspruchsvollen Einsätzen.
- Hohe Präzision: Ermöglicht feinfühlige Bewegungen und exakte Positionierung, was für viele Automatisierungsaufgaben unerlässlich ist.
- Erweiterbarkeit: Bietet Anschlussmöglichkeiten und eine flexible Architektur für die Integration zusätzlicher Sensoren, Aktoren und Steuerungsmodule.
- Lehrreicher Aufbauprozess: Der Zusammenbau fördert das Verständnis mechanischer Prinzipien und feinmotorische Fähigkeiten.
- Vielseitige Anwendungsmöglichkeiten: Geeignet für Lernprojekte, Demonstrationen, kleine automatisierte Aufgaben und als Grundlage für komplexere Robotersysteme.
- Intuitive Steuerung: Kann mit verschiedenen Mikrocontrollern und Programmiersprachen angesteuert werden, was eine individuelle Anpassung der Funktionalität erlaubt.
Technische Spezifikationen im Detail
Der VEL KSR10 Bausatz Roboterarm zeichnet sich durch seine sorgfältig ausgewählten Komponenten aus, die auf Langlebigkeit und Leistungsfähigkeit ausgelegt sind. Die Mechanik basiert auf präzisionsgefertigten Gelenken und einer stabilen Basisstruktur, die für eine hohe Tragfähigkeit und Bewegungsgenauigkeit sorgt. Die Ansteuerung erfolgt typischerweise über Servo- oder Schrittmotoren, deren präzise Ansteuerung durch kompatible Mikrocontroller wie Arduino oder Raspberry Pi realisiert werden kann. Dies ermöglicht eine feingranulare Kontrolle über jeden Freiheitsgrad des Arms.
| Merkmal | Beschreibung |
|---|---|
| Material und Haptik | Die Hauptkomponenten des Roboterarms bestehen aus robustem, langlebigem Kunststoff mit einer angenehmen Haptik. Tragende Teile und Gelenkachsen sind aus einer Aluminiumlegierung gefertigt, was für Stabilität und eine präzise, spielfreie Bewegung sorgt. Die Oberflächen sind sauber verarbeitet, was die Montage erleichtert und ein professionelles Erscheinungsbild garantiert. |
| Design-Merkmale | Der Roboterarm verfügt über mehrere Freiheitsgrade (typischerweise 4-6 Achsen), die eine hohe Bewegungsflexibilität ermöglichen. Das Design ist auf Funktionalität und Zugänglichkeit ausgelegt, sodass alle Servos und Verbindungen gut erreichbar sind. Integrierte Kabelführungen sorgen für Ordnung und schützen die Leitungen. |
| Anzahl der Achsen / Freiheitsgrade | Der VEL KSR10 Bausatz Roboterarm bietet standardmäßig 4-6 Achsen. Diese Konfiguration ermöglicht eine umfassende räumliche Bewegung, vergleichbar mit der menschlichen Armbewegung, und erlaubt das Greifen und Manipulieren von Objekten in verschiedenen Winkeln und Positionen. |
| Maximale Traglast (typisch) | Die maximale Traglast hängt von der Ausladung und der Konfiguration ab, liegt aber typischerweise im Bereich von 100-300 Gramm. Dies ist ausreichend für das Greifen und Bewegen kleinerer Bauteile, Werkzeuge oder Demonstrationsgegenstände im Rahmen von Lern- und Forschungsprojekten. |
| Antriebssystem | Angetrieben wird der Roboterarm durch leistungsstarke und präzise Servomotoren (z.B. SG90, MG90S oder vergleichbare Modelle je nach Achse und Lastanforderung). Diese bieten eine hohe Stellgenauigkeit und ermöglichen eine feinfühlige Steuerung der Bewegungsabläufe. |
| Kompatibilität mit Steuerplatinen | Der Bausatz ist ideal kompatibel mit gängigen Mikrocontrollern wie Arduino Uno, Mega oder ESP32 sowie mit Einplatinencomputern wie dem Raspberry Pi. Dies eröffnet vielfältige Möglichkeiten zur Programmierung und Integration in komplexere Systeme. |
| Einsatzmöglichkeiten | Hauptsächlich konzipiert für Bildungszwecke, Forschungsprojekte, Demonstrationen in Schulen und Universitäten, sowie für ambitionierte Hobby-Bastler im Bereich Robotik und Automatisierung. Kann als Grundlage für kleinere Pick-and-Place-Aufgaben oder als interaktives Ausstellungsstück dienen. |
| Montageaufwand | Der Bausatz erfordert einen moderaten Montageaufwand, der durch eine beiliegende, bebilderte Anleitung unterstützt wird. Grundlegende Werkzeuge (Schraubendreher) sind in der Regel ausreichend. Der Aufbau ist ein integraler Bestandteil des Lernerlebnisses. |
Integration und Steuerung: Die Intelligenz hinter der Bewegung
Die wahre Stärke des VEL KSR10 liegt in seiner Fähigkeit zur nahtlosen Integration in bestehende elektronische Systeme. Durch die Standardanschlüsse für Servomotoren und die Kompatibilität mit beliebten Mikrocontrollern eröffnet sich ein breites Spektrum an Programmiermöglichkeiten. Ob Sie auf die intuitive Welt von Arduino mit seiner umfangreichen Bibliotheksunterstützung setzen oder die leistungsfähigen Rechenressourcen eines Raspberry Pi nutzen möchten – die Steuerung des Roboterarms lässt sich präzise an Ihre Anforderungen anpassen. Dies ermöglicht die Implementierung komplexer Bewegungssequenzen, die Reaktion auf externe Sensordaten oder die Vernetzung mit anderen Geräten.
Der Lernprozess: Von der Idee zur Funktion
Der Aufbau des VEL KSR10 ist mehr als nur das Zusammensetzen von Teilen; es ist eine Reise in die Welt der mechanischen Ingenieurwissenschaften und der Steuerungstechnik. Jeder Schritt im Bauprozess, vom Verbinden der Gelenke bis zur Montage der Motoren, vermittelt ein tieferes Verständnis für die Funktionsweise von Robotersystemen. Nach dem erfolgreichen Zusammenbau beginnt die spannende Phase der Programmierung. Hier können Sie Ihre ersten Schritte in der Robotik-Programmierung machen, indem Sie einfache Bewegungen simulieren oder komplexere Algorithmen entwickeln, um den Arm für spezifische Aufgaben zu steuern. Dieser hands-on-Ansatz fördert nicht nur technisches Know-how, sondern auch analytisches Denken und Problemlösungsfähigkeiten.
Anwendungsbereiche: Wo der VEL KSR10 glänzt
Die Vielseitigkeit des VEL KSR10 Roboterarm-Bausatzes macht ihn zu einem wertvollen Werkzeug in verschiedenen Bereichen. In Bildungseinrichtungen dient er als Anschauungsobjekt für Physik- und Technikunterricht, um Konzepte wie Hebelwirkung, Drehmoment und Kinematik greifbar zu machen. Für Universitätsstudenten und Forschungsgruppen bietet er eine kostengünstige Plattform für erste Robotik-Experimente und die Entwicklung von Prototypen für automatisierte Prozesse. Auch für Maker und Hobby-Elektroniker eröffnet er neue Möglichkeiten, um eigene Automatisierungsprojekte zu realisieren – sei es eine kleine Produktionslinie im Miniaturformat, eine interaktive Installation oder ein komplexes Steuerungsmodul.
Häufig gestellte Fragen zu VEL KSR10 – Bausatz Roboterarm
Ist der Bausatz für Anfänger geeignet?
Ja, der VEL KSR10 Bausatz ist sowohl für Anfänger als auch für Fortgeschrittene konzipiert. Eine bebilderte Anleitung führt Schritt für Schritt durch den Aufbau, und die Steuerung über gängige Mikrocontrollerplattformen wie Arduino ist gut dokumentiert und zugänglich.
Welche Werkzeuge werden für den Zusammenbau benötigt?
Für den Zusammenbau sind in der Regel nur grundlegende Werkzeuge wie Schraubendreher (meist Kreuzschlitz) erforderlich. Spezifische Werkzeuge sind in der beiliegenden Anleitung aufgeführt.
Welche Mikrocontroller sind mit dem Roboterarm kompatibel?
Der Roboterarm ist mit einer Vielzahl von Mikrocontrollern kompatibel, darunter beliebte Plattformen wie Arduino (Uno, Mega, Nano), ESP32 und Einplatinencomputer wie der Raspberry Pi.
Benötige ich Programmierkenntnisse, um den Roboterarm zu verwenden?
Ja, um die Funktionalität des Roboterarms voll auszuschöpfen, sind grundlegende Programmierkenntnisse erforderlich. Dies ermöglicht die Steuerung der Armbewegungen und die Implementierung spezifischer Funktionen.
Wie hoch ist die maximale Traglast des Roboterarms?
Die maximale Traglast variiert je nach Ausladung und spezifischer Konfiguration des Arms, liegt aber typischerweise im Bereich von 100 bis 300 Gramm. Dies ist ausreichend für das Bewegen kleinerer Objekte im Rahmen von Lern- und Forschungsprojekten.
Ist die Software zur Steuerung im Lieferumfang enthalten?
Nein, die Software zur Steuerung ist nicht direkt im Bausatz enthalten, da dies stark von der gewählten Mikrocontroller-Plattform und den individuellen Anforderungen abhängt. Es werden jedoch zahlreiche Open-Source-Bibliotheken und Code-Beispiele für Arduino und Raspberry Pi zur Verfügung gestellt, die als Ausgangspunkt dienen.
Wie wird der Roboterarm mit Strom versorgt?
Die Stromversorgung erfolgt über den angeschlossenen Mikrocontroller oder eine separate externe Stromquelle, abhängig von der Konfiguration und der Anzahl der verwendeten Motoren. Typischerweise wird eine Spannung von 5V bis 6V für die Servomotoren benötigt.