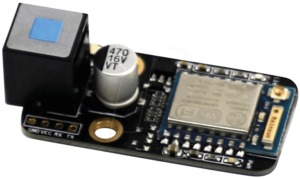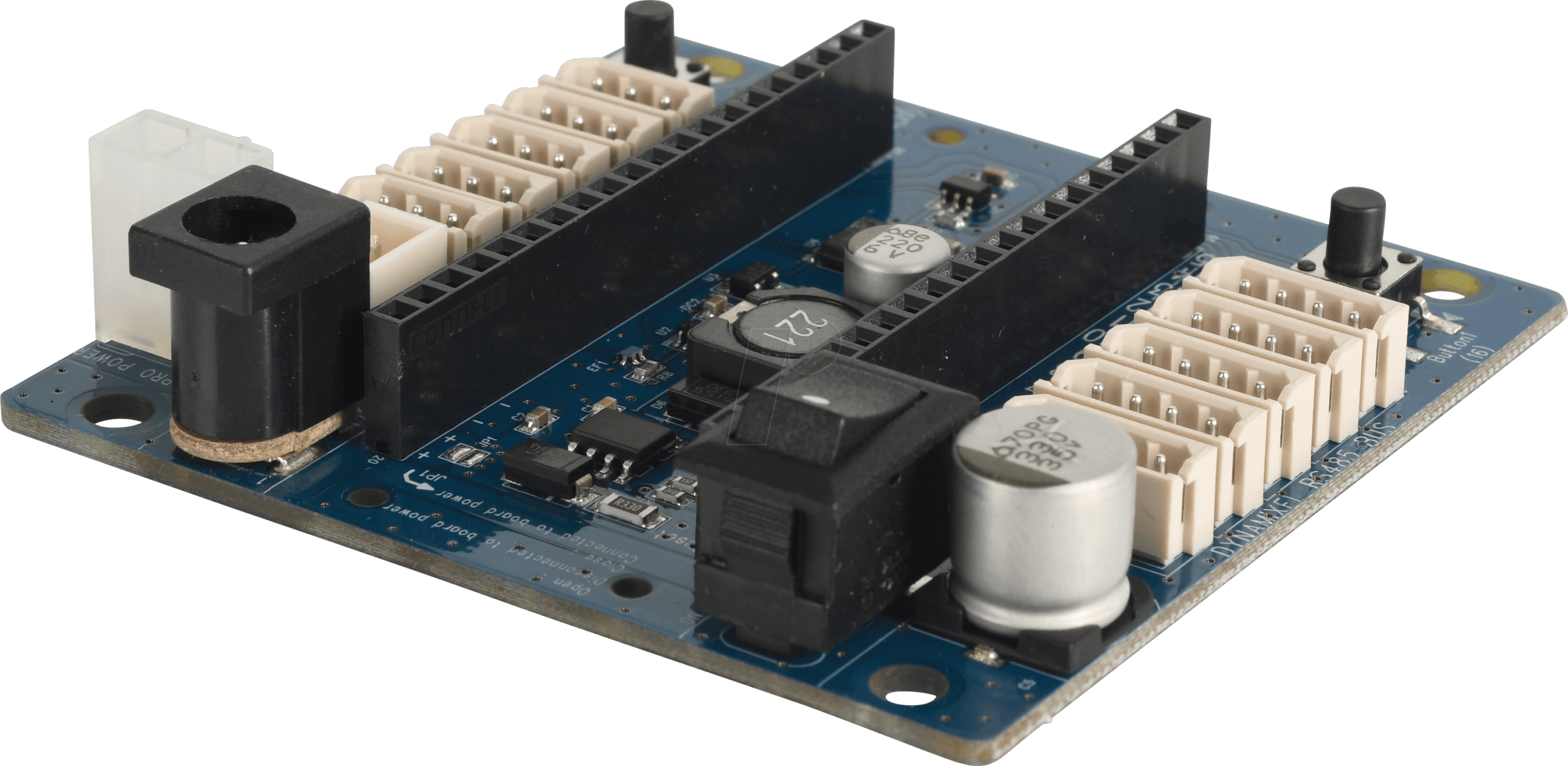
Erweitern Sie Ihre Robotikprojekte mit präziser Servomotorsteuerung: Das OPENCM 485 Expansion Board
Für Ingenieure, Entwickler und Maker, die komplexe Roboter, automatisierte Systeme oder interaktive Installationen realisieren möchten, stellt die präzise und zuverlässige Steuerung einer Vielzahl von Servomotoren oft eine zentrale Herausforderung dar. Das OPENCM 485 Expansion Board wurde entwickelt, um genau dieses Problem zu lösen und bietet eine hochentwickelte Lösung zur nahtlosen Integration und Steuerung von Servomotoren direkt über Ihre OPENCM-Plattform.
Maximale Kontrolle und Flexibilität für anspruchsvolle Anwendungen
Das OPENCM 485 Expansion Board setzt neue Maßstäbe in der Servomotorsteuerung durch seine Fähigkeit, eine erhebliche Anzahl von Servomotoren gleichzeitig mit höchster Präzision anzusteuern. Im Gegensatz zu Standardlösungen, die oft auf eine begrenzte Anzahl von Kanälen beschränkt sind und Kompromisse bei der Signalqualität eingehen, ermöglicht dieses Board eine feingranulare Einstellung der Servoposition, Geschwindigkeit und sogar der PID-Regelungsparameter direkt über die OPENCM-Mikrocontroller-Umgebung. Dies resultiert in flüssigeren Bewegungsabläufen, einer erhöhten Reaktionsgeschwindigkeit und der Möglichkeit, komplexe kinetische Sequenzen ohne Verzögerungen oder Signalinterferenzen zu realisieren. Die fortschrittliche Architektur des Boards minimiert Jitter und gewährleistet eine konstante Signalintegrität, selbst unter Last und bei dynamischen Bewegungen, was für präzise mechanische Abläufe unerlässlich ist.
Umfassende Konnektivität und erweiterte Funktionalität
Die primäre Funktion des OPENCM 485 Expansion Boards ist die Erweiterung der Servomotorsteuerungsfähigkeiten Ihrer kompatiblen OPENCM-Hardware. Es bietet eine robuste Schnittstelle, die es ermöglicht, eine beachtliche Anzahl von Servomotoren über eine einzige Verbindung zu verwalten. Dies reduziert die Komplexität der Verkabelung und vereinfacht das Systemdesign erheblich. Darüber hinaus ist das Board für seine optimierte Kommunikation mit den OPENCM-Prozessoren konzipiert, was eine schnelle Datenübertragung und eine latenzarme Steuerung ermöglicht. Die Implementierung erfolgt über dedizierte Protokolle, die eine zuverlässige und effiziente Steuerung gewährleisten.
Fortschrittliche Steuerungsparameter für feinjustierte Bewegungen
Mit dem OPENCM 485 Expansion Board erhalten Sie die Werkzeuge, um die Bewegungen Ihrer Servomotoren bis ins kleinste Detail zu optimieren. Das Board unterstützt nicht nur die einfache Einstellung von Winkelpositionen, sondern auch die präzise Steuerung von Geschwindigkeitsprofilen. Dies ermöglicht die Erzeugung sanfter Beschleunigungs- und Bremsrampen, die für die Reduzierung von mechanischem Verschleiß und die Verbesserung der Systemdynamik entscheidend sind. Für Anwender, die eine noch höhere Präzision benötigen, bietet die Integration von PID-Regelungsparametern die Möglichkeit, die Regelschleifen für jeden Servomotor individuell anzupassen. Dies ist besonders wichtig in Anwendungen, bei denen externe Störungen oder Lastschwankungen auftreten können, und gewährleistet, dass die Servos ihre Zielpositionen auch unter widrigen Bedingungen exakt beibehalten.
Vorteile des OPENCM 485 – Expansion Board Servomotoren
- Umfangreiche Servokontrolle: Ermöglicht die gleichzeitige Ansteuerung einer großen Anzahl von Servomotoren, was die Realisierung komplexer Robotersysteme vereinfacht.
- Hohe Präzision und Stabilität: Bietet fein granulares Tuning für Position, Geschwindigkeit und PID-Regelung, was zu flüssigen und wiederholbaren Bewegungen führt.
- Optimierte Signalintegrität: Fortschrittliche Schaltungstechnik minimiert Jitter und sorgt für konstante Signalqualität, selbst bei hoher Auslastung.
- Einfache Integration: Nahtlose Kompatibilität mit OPENCM-Plattformen reduziert Entwicklungsaufwand und Komplexität.
- Flexible Anwendungsmöglichkeiten: Ideal für Robotik, Automatisierung, Prototyping, interaktive Kunst und anspruchsvolle mechanische Steuerungsaufgaben.
- Reduzierte Verkabelung: Zentralisierte Steuerung minimiert die Notwendigkeit für eine extensive und unübersichtliche Verkabelung.
- Erweiterte Leistungsmerkmale: Unterstützung für detaillierte Geschwindigkeitssteuerung und PID-Parametrierung für fortgeschrittene Applikationen.
Technische Spezifikationen im Detail
| Merkmal | Spezifikation |
|---|---|
| Anzahl steuerbarer Servos (max.) | Variiert je nach OPENCM-Plattform und verfügbarer Bandbreite, typischerweise im zweistelligen Bereich pro Board. |
| Kommunikationsschnittstelle | Optimiert für OPENCM-Prozessoren, nutzt dedizierte digitale Protokolle. |
| Auflösung der Positionseinstellung | Hohe Auflösung, typischerweise im Bereich von Mikrosekunden Impulsbreite, ermöglicht präzise Winkelsteuerung. |
| Geschwindigkeitsregelung | Unterstützung für kontinuierliche Geschwindigkeitsrampen und Zielgeschwindigkeiten. |
| PID-Regelung | Implementierung von PID-Regelungsalgorithmen auf Board- oder Host-Ebene für dynamische Stabilität. |
| Stromversorgung | Gezogene Leistung abhängig von Anzahl und Last der Servomotoren; separate Stromversorgung für Servos empfohlen. |
| Abmessungen | Kompaktes Formfaktordesign zur einfachen Montage auf bestehenden OPENCM-Boards. |
| Betriebstemperatur | Standard-Industrietemperaturbereich für zuverlässigen Betrieb in verschiedenen Umgebungen. |
Anwendungsbereiche für das OPENCM 485 – Expansion Board Servomotoren
Die Vielseitigkeit des OPENCM 485 Expansion Boards eröffnet eine breite Palette von Anwendungsmöglichkeiten. In der Robotik dient es als Rückgrat für die präzise Manipulation durch Roboterarme, mobile Plattformen oder humanoide Roboter, bei denen komplexe Kinematiken und flüssige Bewegungsübergänge entscheidend sind. Für industrielle Automatisierungslösungen ermöglicht das Board die Steuerung von Greifern, Sortierern oder Positionierungssystemen mit höchster Genauigkeit und Wiederholbarkeit. Im Bereich des Prototypings und der Maker-Szene ist es die ideale Lösung für die Umsetzung interaktiver Kunstinstallationen, intelligenter Haushaltsgeräte oder komplexer mechanischer Modelle, die über einfache Steuerungen hinausgehen. Die Fähigkeit, eine große Anzahl von Servos zu verwalten, macht es auch zu einer bevorzugten Wahl für Forschungsprojekte, die sich mit komplexen mechanischen Systemen befassen.
Häufig gestellte Fragen (FAQ)
Was ist der Hauptvorteil des OPENCM 485 – Expansion Board Servomotoren gegenüber Standard-Servo-Controllern?
Der Hauptvorteil liegt in der hochpräzisen, synchronen Steuerung einer großen Anzahl von Servomotoren, optimiert für die OPENCM-Plattform. Dies ermöglicht komplexere und flüssigere Bewegungsabläufe, mit detaillierterer Kontrolle über Geschwindigkeit und PID-Parameter, im Gegensatz zu oft limitierten Kanälen und geringerer Präzision bei Standardlösungen.
Welche Art von Servomotoren kann ich mit dem OPENCM 485 Expansion Board steuern?
Das Board ist für die Steuerung gängiger PWM-gesteuerter Servomotoren ausgelegt. Die genaue Anzahl und die Leistungsanforderungen der Servomotoren hängen von den Spezifikationen der OPENCM-Plattform und der externen Stromversorgung ab.
Benötige ich zusätzliche Softwarebibliotheken, um das Board zu nutzen?
Ja, typischerweise werden spezifische Bibliotheken und Treiber für die OPENCM-Entwicklungsumgebung benötigt, um die volle Funktionalität des Expansion Boards nutzen zu können. Diese sind oft Teil des OPENCM-SDKs oder werden separat bereitgestellt.
Wie wird das Board mit Strom versorgt?
Das Expansion Board wird über die angeschlossene OPENCM-Plattform mit Strom versorgt. Es wird jedoch dringend empfohlen, eine separate, leistungsstarke Stromversorgung für die Servomotoren selbst bereitzustellen, um eine stabile Leistung zu gewährleisten und die OPENCM-Plattform nicht zu überlasten.
Ist das OPENCM 485 Expansion Board mit allen OPENCM-Boards kompatibel?
Die Kompatibilität ist in der Regel auf spezifische OPENCM-Board-Serien oder -Modelle ausgelegt, die über die erforderlichen Schnittstellen und die notwendige Rechenleistung verfügen. Bitte überprüfen Sie die Produktdokumentation für genaue Kompatibilitätsinformationen.
Kann ich die Servomotoren während des Betriebs neu kalibrieren?
Ja, durch die Softwaresteuerung haben Sie die Möglichkeit, die Servopositionen und -parameter dynamisch anzupassen und gegebenenfalls neu zu kalibrieren, um auf veränderte Bedingungen zu reagieren.
Welche Vorteile bietet die PID-Regelung für meine Servomotoren?
Die PID-Regelung (Proportional-Integral-Derivativ) ermöglicht eine noch präzisere und stabilere Steuerung der Servomotoren. Sie hilft, unerwünschte Schwingungen zu dämpfen, Überschwingen zu minimieren und die Servos auch unter wechselnden Lastbedingungen oder bei externen Störungen exakt in ihrer Position zu halten.