Entdecken Sie den GRABIT ROBOT-ARM – Präzision und Kontrolle für Ihre Projekte
Der GRABIT ROBOT-ARM – Grab-it Roboter Arm Bausatz wurde entwickelt, um die Handhabung kleiner und mittlerer Objekte in einer Vielzahl von Umgebungen zu revolutionieren. Ob für anspruchsvolle Hobbyprojekte, bildungsorientierte Experimente im MINT-Bereich oder als vielseitiges Werkzeug in der Prototypenentwicklung – dieser Bausatz ermöglicht Anwendern, die Kraft und Präzision eines Roboterarms mit eigener Hand zu erleben und zu steuern. Er adressiert gezielt die Notwendigkeit einer präzisen Greiffunktion, die über einfache mechanische Hilfsmittel hinausgeht und eine flexible, ferngesteuerte Interaktion mit der physischen Welt ermöglicht.
Die überlegene Wahl: Präzision, Flexibilität und Lernpotenzial
Im Vergleich zu statischen Greifwerkzeugen oder einfachen mechanischen Zangen bietet der GRABIT ROBOT-ARM eine unübertroffene Kombination aus Bewegungsfreiheit, feinfühliger Steuerung und der Möglichkeit zur Individualisierung. Er verkörpert die Synthese aus Mechanik und Steuerungstechnik, die es Ihnen erlaubt, Objekte mit einer Genauigkeit zu positionieren und zu handhaben, die manuell nur schwer oder gar nicht erreichbar wäre. Die Möglichkeit, den Arm selbst zu montieren und zu konfigurieren, schafft zudem ein tiefes Verständnis für die zugrundeliegenden technologischen Prinzipien, was ihn zu einer wertvollen Ressource für Bildung und fortgeschrittene Anwender macht.
Technische Spezifikationen und Konstruktionsmerkmale
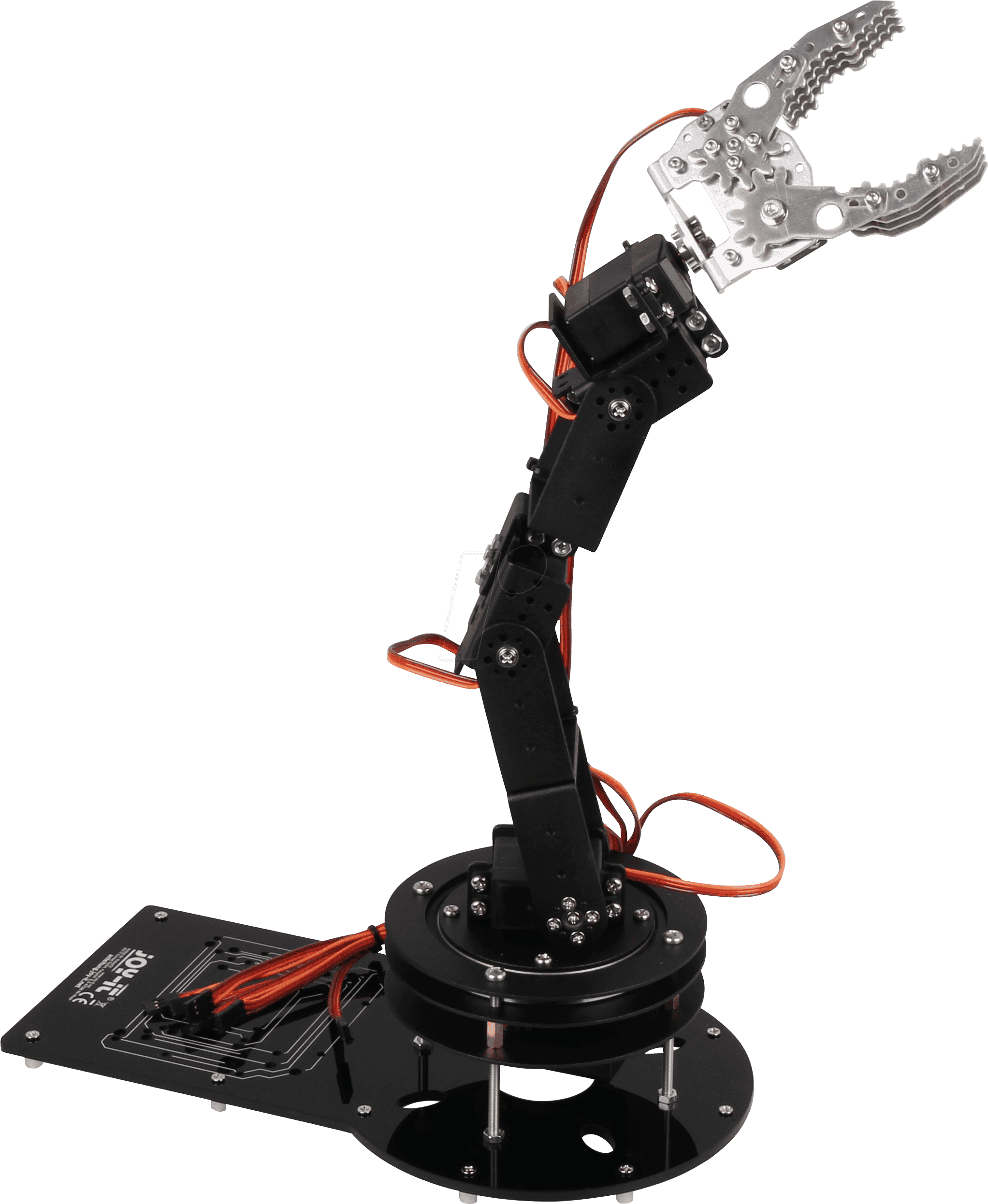
Der GRABIT ROBOT-ARM zeichnet sich durch eine robuste Konstruktion und eine durchdachte Mechanik aus, die auf Langlebigkeit und präzise Bewegungsabläufe ausgelegt ist. Die Verwendung hochwertiger Materialien gewährleistet Stabilität und Widerstandsfähigkeit auch bei wiederholtem Einsatz. Die Modularität des Bausatzes erlaubt nicht nur eine einfache Montage, sondern eröffnet auch Wege für spätere Upgrades und Anpassungen an spezifische Anforderungen. Die integrierte Steuereinheit ermöglicht eine intuitive Bedienung und die Realisierung komplexer Bewegungssequenzen, die durch die präzisen Servomotoren umgesetzt werden.
Leistungsstarke Funktionalität und Anwendungsbereiche
Die Kernfunktionalität des GRABIT ROBOT-ARM liegt in seiner Fähigkeit, Objekte präzise zu greifen, zu bewegen und zu positionieren. Die Bewegungsachsen – typischerweise in mehreren Freiheitsgraden ausgelegt – ermöglichen eine hohe Flexibilität bei der Zielerfassung und -manipulation. Dies macht den Roboterarm zu einem idealen Werkzeug für:
- Bildung und MINT-Fächer: Zum Erlernen von Robotik, Programmierung und Mechanik in Schulen und Universitäten.
- Hobby- und Maker-Projekte: Für anspruchsvolle Bastelarbeiten, den Bau von Automatisierungslösungen oder interaktiven Installationen.
- Prototypenentwicklung: Zur schnellen Erstellung von Greif- und Handhabungsmodulen in der frühen Phase der Produktentwicklung.
- Forschung und Entwicklung: Als flexibles Werkzeug für Experimente, die präzise Objektmanipulation erfordern.
- Demonstrationszwecke: Zur Veranschaulichung robotergestützter Greif- und Fertigungsprozesse.
Materialien und Konstruktion – Qualität, die überzeugt
Die Auswahl der Materialien für den GRABIT ROBOT-ARM ist entscheidend für seine Leistungsfähigkeit und Langlebigkeit. Typischerweise kommen widerstandsfähige Kunststoffe wie ABS oder Acryl zum Einsatz, die ein gutes Verhältnis von Stabilität und Gewicht bieten. Ergänzt werden diese oft durch Metallkomponenten, insbesondere an Gelenken und Lagerpunkten, um Verschleiß zu minimieren und Präzision zu gewährleisten. Die Verbindungselemente sind so gewählt, dass eine sichere und stabile Montage möglich ist, die auch den Kräften standhält, die bei der Objektmanipulation auftreten.
Umfangreiche Eigenschaften des GRABIT ROBOT-ARM
| Eigenschaft | Beschreibung |
|---|---|
| Material (Struktur) | Hochwertige, langlebige Kunststoffe (z.B. ABS, Acryl) für Rahmen und Gelenkarme; Metalllegierungen für Lager und kritische Verbindungen. Bietet ein optimales Verhältnis von Stabilität, Gewicht und Haltbarkeit. |
| Antriebssystem | Präzise Servomotoren, die eine feinfühlige und gesteuerte Bewegung über mehrere Achsen ermöglichen. Sorgt für genaue Positionierung und sicheres Greifen. |
| Greifmechanismus | Robuster und doch präziser Greifer, der für eine Vielzahl von Objektformen und -größen angepasst werden kann. Ermöglicht variables Greifen und Lösen. |
| Steuerungsoptionen | Kompatibel mit gängigen Mikrocontrollern (z.B. Arduino, Raspberry Pi) und optional mit spezialisierten Steuerkonsolen oder Software-Interfaces. Ermöglicht vielfältige Programmier- und Fernsteuerungsmöglichkeiten. |
| Montageaufwand | Als Bausatz konzipiert, erfordert eine sorgfältige Montage, die das Verständnis mechanischer und elektronischer Zusammenhänge fördert. Alle notwendigen Teile und Anleitungen sind enthalten. |
| Einsatzmöglichkeiten | Bildung, Prototypenentwicklung, Hobbyprojekte, Demonstration von Automatisierungstechnik, MINT-Lernplattformen. |
| Erweiterbarkeit | Modulares Design, das optional Erweiterungen und Modifikationen für spezifische Anwendungsfälle unterstützt. Bietet Spielraum für Individualisierung und Weiterentwicklung. |
Präzise Steuerung und Kinematik
Die Kinematik des GRABIT ROBOT-ARM ist darauf ausgelegt, ein hohes Maß an Bewegungsfreiheit zu bieten. Typischerweise verfügt der Arm über mehrere Freiheitsgrade (Degrees of Freedom – DoF), die es ihm ermöglichen, sich in drei Dimensionen zu bewegen und zu rotieren. Dies wird durch die sorgfältige Platzierung und Ansteuerung von Servomotoren erreicht, die präzise Winkelbewegungen ausführen. Die Ansteuerung erfolgt über ein internes oder externes Steuerboard, das die Signale von einem Mikrocontroller oder einer Fernbedienung interpretiert und an die Motoren weiterleitet. Die Präzision der Bewegungen wird durch die Qualität der Servos, die Steifigkeit der Struktur und die Genauigkeit der kinematischen Berechnungen bestimmt. Dies ermöglicht das Heben, Senken, Schwenken und Drehen von Objekten mit einer Genauigkeit, die für komplexe Montageaufgaben oder feine Manipulationen unerlässlich ist.
Das Lernpotenzial des GRABIT ROBOT-ARM
Der GRABIT ROBOT-ARM ist weit mehr als nur ein Werkzeug; er ist eine Plattform für Bildung und Wissensvermittlung. Durch den Prozess der Montage erhalten Anwender Einblicke in die Konstruktion mechanischer Systeme, das Zusammenspiel von Zahnrädern, Gelenken und Servomotoren. Die nachfolgende Programmierung des Arms zur Ausführung spezifischer Aufgaben lehrt die Grundlagen der Robotik, der Steuerungslogik und der algorithmischen Problemlösung. Dies ist besonders wertvoll in akademischen Umgebungen, wo der Bausatz als integraler Bestandteil von Lehrplänen im Bereich Ingenieurwesen, Informatik und angewandte Wissenschaften eingesetzt werden kann. Auch für technikinteressierte Hobbyisten bietet der Roboterarm eine hervorragende Möglichkeit, praktische Erfahrungen in einem zunehmend automatisierten Umfeld zu sammeln.
Verwendungszweck und Implementierung
Der GRABIT ROBOT-ARM ist konzipiert für Szenarien, in denen eine automatisierte oder ferngesteuerte Objektmanipulation erforderlich ist. Dies reicht von einfachen Pick-and-Place-Aufgaben bis hin zu komplexeren Montageprozessen. Seine Anwendung findet er häufig in:
- Laboratorien zur automatisierten Handhabung von Proben oder Reagenzien.
- Werkstätten für Montagehilfen oder zur Demonstration von Fertigungsschritten.
- Bildungszentren als interaktives Lernobjekt für Programmierung und Robotik.
- Privatpersonen mit Interesse an fortgeschrittenen Maker-Projekten und Heimautomatisierung.
Die Integration in bestehende Systeme ist durch die standardisierten Schnittstellen und die programmierbare Natur des Arms weitgehend unkompliziert. Die Möglichkeit, kundenspezifische Greifer oder Werkzeuge anzubringen, erweitert das Anwendungsspektrum erheblich.
FAQ – Häufig gestellte Fragen zu GRABIT ROBOT-ARM – Grab-it Roboter Arm Bausatz
Welche Vorkenntnisse sind für die Montage und Bedienung des GRABIT ROBOT-ARM erforderlich?
Für die Montage sind grundlegende handwerkliche Fähigkeiten und das Befolgen von Anleitungen ausreichend. Für die Programmierung und fortgeschrittene Bedienung sind Kenntnisse in Mikrocontroller-Programmierung (z.B. C++ für Arduino) von Vorteil, aber der Bausatz eignet sich auch hervorragend zum Erlernen dieser Fähigkeiten.
Wie präzise ist der GRABIT ROBOT-ARM?
Die Präzision hängt von verschiedenen Faktoren ab, einschließlich der Qualität der verbauten Servomotoren und der Steifigkeit der Struktur. Der Bausatz ist darauf ausgelegt, eine für viele Anwendungen ausreichende Präzision zu bieten, insbesondere im Bildungs- und Hobbybereich. Für höchste Präzisionsanforderungen können professionelle Upgrades in Betracht gezogen werden.
Welche Art von Objekten kann der GRABIT ROBOT-ARM handhaben?
Der Arm ist für die Handhabung von Objekten unterschiedlicher Formen und Größen konzipiert, solange diese innerhalb des Greifbereichs und des Gewichtslimits des Arms liegen. Die Art des Greifers kann gegebenenfalls angepasst werden, um spezifische Objektformen optimal zu erfassen.
Ist der GRABIT ROBOT-ARM mit anderen Systemen kompatibel?
Ja, der GRABIT ROBOT-ARM ist in der Regel mit gängigen Mikrocontrollern wie Arduino und Raspberry Pi kompatibel, was eine einfache Integration in größere Projekte oder bestehende Automatisierungslösungen ermöglicht.
Wie wird der GRABIT ROBOT-ARM mit Strom versorgt?
Die Stromversorgung erfolgt typischerweise über eine externe Stromquelle, die an das Steuerboard des Roboters angeschlossen wird. Die genauen Spezifikationen der benötigten Stromversorgung sind in der mitgelieferten Dokumentation aufgeführt.
Kann der GRABIT ROBOT-ARM auch außerhalb des Bausatzes modifiziert werden?
Ja, das modulare Design des GRABIT ROBOT-ARM fördert Anpassungen und Erweiterungen. Fortgeschrittene Benutzer können den Arm modifizieren, um seine Funktionalität zu erweitern oder an spezifische Anwendungsfälle anzupassen.
Welche Art von Software wird zur Steuerung des Arms benötigt?
Die Steuerung erfolgt meist über eine Programmierumgebung, die mit dem verwendeten Mikrocontroller kompatibel ist. Dies kann beispielsweise die Arduino IDE für Programme in C++ oder Python-Skripte für den Raspberry Pi sein. Beispielcode und Bibliotheken sind oft Teil des Bausatzes oder online verfügbar.